원궤도제한삼체문제(CR3BP)의 운동방정식은 비선형 연립 미분방정식이므로 수치적으로 풀어야 하는데, 방정식에는 스케일이 크게 다른 항이 혼재되어 있다. 예를 들면 각속도 \(\omega_s\)는 매우 작은 값을 갖는 반면 질량, 거리 등은 매우 큰 값을 갖는다. 이와 같이 수치적 방법에서 스케일이 크게 다른 값이 혼재되어 있을 때 각 항들을 적절한 척도를 이용하여 스케일을 조정한다면 수치 오차를 최소화시킬 수 있다.
CR3BP의 운동방정식을 무차원화(nondimensionalization)하여 수치 오차를 최소화하고 또한 사용되는 파라미터를 줄여 방정식을 단순화시켜 보자.

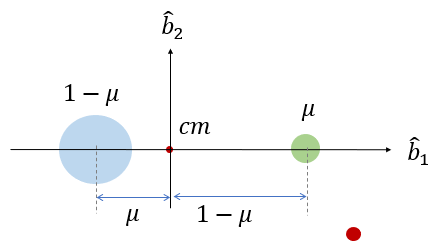
방정식을 무차원화하기 위해서는 먼저 기준 질량, 기준 거리, 기준 시간을 정해야 한다. 기준 질량 \(m_0\)으로서 두 주요(primary) 질점인 \(m_1\)과 \(m_2\)의 질량 합을, 기준 거리 \(l_0\)로는 두 질점 사이의 거리, 그리고 기준 시간 \(t_0\)으로는 두 질점의 각속도의 역수를 선택한다.
\[ m_0=m_1+m_2, \ \ \ \ l_0=r_{12}, \ \ \ \ t_0=\frac{1}{\omega_s} \tag{1} \]
그리고 무차원화된 질량과 거리, 시간을 다음과 같은 기호로 표시한다.
\[ \begin{align} & \mu= \frac{m_2}{m_1+m_2 }, \ \ \ \ 1-\mu=\frac{m_1}{m_1+m_2} \tag{2} \\ \\ & \tilde{x}=\frac{x}{r_{12}}, \ \ \ \ \tilde{y}=\frac{y}{r_{12}}, \ \ \ \ \tilde{z}=\frac{z}{r_{12}} \\ \\ & \tilde{r}_{13}=\frac{r_{13}}{r_{12}}, \ \ \ \ \tilde{r}_{23}=\frac{r_{23}}{r_{12}}, \ \ \ \ \tilde{t}=\omega_s t \end{align} \]
그러면 질량중심의 정의에 의해서 \(m_1 r_1=m_2 r_2\) 가 성립하므로 다음과 같이 무차원화된 거리를 계산할 수 있다.
\[ \frac{r_1}{r_{12}} = \mu, \ \ \ \ \frac{r_2}{r_{12}} = 1- \mu \tag{3} \]
한편, 무차원화된 미분을 계산하면 다음과 같다.
\[ \begin{align} \dot{x} &= \frac{dx}{dt}= \frac{ d(r_{12} \tilde{x}) }{ d \left( \tilde{t} / \omega_s \right) } = r_{12} \omega_s \frac{d \tilde{x} }{ d\tilde{t} } \tag{4} \\ \\ &=r_{12} \omega_s \dot{\tilde{x}} \\ \\ \\ \ddot{x} &= \frac{d}{dt} \left( \frac{dx}{dt} \right) = \frac{d}{ d \left( \tilde{t}/ \omega_s \right) } \left( r_{12} \omega_s \frac{d \tilde{x} }{d \tilde{t} } \right) \tag{5} \\ \\ &= r_{12} \omega_s^2 \frac{d}{d \tilde{t} } \left( \frac{d \tilde{x}}{d \tilde{t} } \right) \\ \\ &= r_{12} \omega_s^2 \ddot{\tilde{x}} \end{align} \]
이제 운동방정식을 무차원화하기 위한 준비를 마쳤으므로 CR3BP의 운동방정식의 \(\hat{b}_1\)축 방정식을 무차원화해 본다.
\(\hat{b}_1\)축 운동방정식은 다음과 같았다.
\[ \ddot{x}-2\omega_s \dot{y}-\omega_s^2 x = - \frac{Gm_1 (x+r_1 )}{r^3_{13}} - \frac{Gm_2 (x-r_2 )}{r^3_{23}} \tag{6} \]
이 식에 무차원 관계식 (2)~(5)를 적용한다.
\[ \begin{align} r_{12} \omega_s^2 \ddot{\tilde{x}} & -2\omega_s r_{12} \omega_s \dot{\tilde{y}} - \omega_s^2 r_{12} \tilde{x} \\ \\ &= - \frac{Gm_1 (r_{12} \tilde{x}+r_{12} \mu )}{r^3_{12} \tilde{r}^3_{13}} - \frac{Gm_2 (r_{12} \tilde{x}-r_{12} (1-\mu) )}{r^3_{12} \tilde{r}^3_{23}} \end{align} \]
위 식의 양변을 \(r_{12} \omega_s^2 \)로 나누면 다음과 같다.
\[ \ddot{\tilde{x}} -2 \dot{\tilde{y}} - \tilde{x} = - \frac{Gm_1 ( \tilde{x}+ \mu )}{\omega_s^3 r^3_{12} \tilde{r}^3_{13}} - \frac{Gm_2 ( \tilde{x} +\mu - 1)}{\omega_s^2 r^3_{12} \tilde{r}^3_{23}} \]
계속해서 각속도 관계식 \(\omega_s^2=G(m_1+m_2 )/r_{12}^3 \)을 이용하면 위 식은 다음과 같이 된다.
\[ \ddot{\tilde{x}} -2 \dot{\tilde{y}} - \tilde{x} = - \frac{Gm_1 ( \tilde{x}+ \mu )}{G(m_1+m_2) \tilde{r}^3_{13}} - \frac{Gm_2 ( \tilde{x} +\mu - 1)}{ G(m_1+m_2) \tilde{r}^3_{23}} \]
식 (2)를 이용하면 위 식은 최종적으로 다음과 같은 무차원화된 미분방정식이 된다.
\[ \ddot{\tilde{x}} -2 \dot{\tilde{y}} - \tilde{x} = - \frac{ (1-\mu) ( \tilde{x}+ \mu )}{ \tilde{r}^3_{13}} - \frac{ \mu ( \tilde{x} +\mu - 1)}{ \tilde{r}^3_{23}} \tag{7} \]
비슷한 방법으로 \(\hat{b}_2\)축과 \(\hat{b}_3\)축의 방정식을 무차원화시키면 다음과 같다.
\[ \begin{align} & \ddot{\tilde{y}} +2 \dot{\tilde{x}} - \tilde{y} = - \frac{ (1-\mu) \tilde{y} }{ \tilde{r}^3_{13}} - \frac{ \mu \tilde{y} }{ \tilde{r}^3_{23}} \tag{8} \\ \\ & \ddot{\tilde{z}} = - \frac{ (1-\mu) \tilde{z} }{ \tilde{r}^3_{13}} - \frac{ \mu \tilde{z} }{ \tilde{r}^3_{23}} \tag{9} \end{align} \]
여기서
\[ \begin{align} \tilde{r}_{13} &= \frac{r_{13}}{r_{12}} = \sqrt{ \frac{ (x+r_1 )^2+y^2+z^2 }{ r_{12}^2 } } \\ \\ &= \sqrt{( \tilde{x}+\mu)^2+ \tilde{y}^2+ \tilde{z}^2 } \\ \\ \\ \tilde{r}_{23} &= \frac{r_{23}}{r_{12}} = \sqrt{ \frac{ (x-r_2 )^2+y^2+z^2 }{ r_{12}^2 } } \\ \\ &= \sqrt{( \tilde{x}+\mu - 1)^2+ \tilde{y}^2+ \tilde{z}^2 } \end{align} \]
이다.
무차원화된 CR3BP의 기하학적 배치는 다음 그림과 같다.
정리하면 CR3BP 운동방정식은 다음과 같고,
\[ \begin{align} & \ddot{x} -2 \omega_s \dot{y} - \omega_s^2 x = - \frac{ Gm_1 ( x+ r_1 )}{ r^3_{13}} - \frac{ Gm_2 ( x - r_2)}{ r^3_{23}} \\ \\ & \ddot{y} +2 \omega_s \dot{x} - \omega_s^2 y = - \frac{ Gm_1 y}{ r^3_{13}} - \frac{ Gm_2 y}{ r^3_{23}} \\ \\ & \ddot{z} = - \frac{ Gm_1 z}{ r^3_{13}} - \frac{ Gm_2 z}{ r^3_{23}} \end{align} \]
무차원화된 운동방정식은 다음과 같다.
\[ \begin{align} & \ddot{\tilde{x}} -2 \dot{\tilde{y}} - \tilde{x} = - \frac{ (1-\mu) ( \tilde{x}+ \mu )}{ \tilde{r}^3_{13}} - \frac{ \mu ( \tilde{x} +\mu - 1)}{ \tilde{r}^3_{23}} \\ \\ & \ddot{\tilde{y}} +2 \dot{\tilde{x}} - \tilde{y} = - \frac{ (1-\mu) \tilde{y} }{ \tilde{r}^3_{13}} - \frac{ \mu \tilde{y} }{ \tilde{r}^3_{23}} \\ \\ & \ddot{\tilde{z}} = - \frac{ (1-\mu) \tilde{z} }{ \tilde{r}^3_{13}} - \frac{ \mu \tilde{z} }{ \tilde{r}^3_{23}} \end{align} \]
'항공우주 > 우주역학' 카테고리의 다른 글
| [CR3BP] 자코비 적분 (Jacobi Integral) (0) | 2021.06.16 |
|---|---|
| [CR3BP] 라그랑지 포인트 (Lagrange Point) (0) | 2021.04.10 |
| [CR3BP] 운동방정식 유도 (0) | 2021.04.08 |
| 삼체문제 (Three-Body Problem) (0) | 2021.04.07 |
| 기본 궤도 미분 방정식 - 궤적 방정식 (0) | 2021.03.01 |




댓글