3자유도 짐벌 시스템에는 3개의 고리가 있다. 각각의 고리는 자신이 가진 단일 회전축을 중심으로만 회전할 수 있다. 한 고리의 회전축은 다른 두 고리의 회전축과 서로 직각을 이루도록 만들어졌다.
가장 바깥쪽 고리(빨강색)는 짐벌 시스템의 외부에 지지되어 있는 축을 중심으로 회전한다. 중간에 있는 고리(녹색)는 가장 바깥 쪽 고리에 회전축이 부착되어 있다. 가장 안쪽 고리(파랑색)는 회전축이 중간 고리에 부착되어 있다.
따라서 가장 바깥쪽 고리(빨강색)가 회전하면 안쪽에 있는 두개의 고리도 함께 움직이지만, 가장 안쪽에 있는 고리(파랑색)가 회전하더라도 그 바깥 쪽 고리는 영향을 받지 않는다. 이와 같이 3개의 고리가 서로 직각인 회전축을 갖는 구조를 3자유도 짐벌 시스템이라고 한다.
이러한 짐벌 시스템의 가장 안쪽 고리(파랑색)의 회전축에 자이로스코프나 가속도계와 같은 관성센서나 카메라 등의 기기나 물체를 장착하여 짐벌 시스템이 설치된 외부 지지대가 흔들리더라도 수평을 유지하는 목적으로 사용된다.
이와 같은 3 자유도 짐벌 시스템도 3-2-1 오일러각 방식으로 짐벌에 장착된 물체의 자세각을 표현하거나 또는 좌표변환을 설명할 수 있다.
먼저 짐볼 시스템의 한가운데에 좌표계 \(\{a\}\)의 원점을 두고 가장 바깥쪽 고리의 회전축 방향을 \(\hat{a}_3\) 축, 가운데 고리의 회전축 방향을 \(\hat{a}_2\) 축, 가장 안쪽 고리의 회전축 방향을 \(\hat{a}_1\) 축으로 삼는다. 물체에도 동일한 좌표계를 부착해 논다.
먼저 \(\hat{a}_3\) 축을 중심으로 \(\psi\) 만큼 회전한다. 그러면 좌표계 \(\{a\}\)가 좌표계 \(\{m\}\)이 된다. \(\hat{a}_3\) 축은 \(\hat{m}_3\) 축으로 이름만 바뀌고 가운데 고리(녹색)의 회전축 방향은 이제 \(\hat{m}_2\) 축이 되고, 가장 안쪽 고리(파랑색)의 회전축 방향은 \(\hat{m}_1\) 축이 된다.

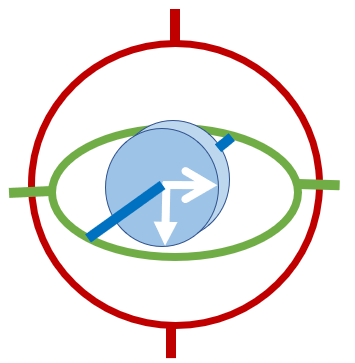
그 다음 \(\hat{m}_2\) 축을 중심으로 \(\theta\)만큼 회전한다. 여기서는 짐벌락 상황을 만들기 위해서 \(\theta=90\)도 만큼 회전한다.그러면 좌표계 \(\{m\}\)은 좌표계 \(\{n\}\)이 된다. \(\hat{m}_2\) 축은 \(\hat{n}_2\) 축으로 이름만 바뀌고 \(\hat{n}_1 = - \hat{m}_3\) 축이 된다. 즉, \(\hat{n}_1\) 축이 \(\hat{m}_3\) 축의 반대 방향이 된다. 또한 \(\hat{a}_3\) 축의 반대 방향이기도 하다. 이렇게 되면 그림에서 보듯이 가장 바깥쪽 고리(빨강색)과 가장 안쪽 고리(파랑색)의 회전축이 일치하게 된다.

이런 상태를 짐벌락(gimbal lock)이라고 한다. 여기서 락(lock), 즉 잠금이라는 용어 때문에 짐벌이 회전하지 못하고 자물쇠로 단단히 묶인 것으로 오해하는 사람이 많다. 그렇지 않다. 짐벌 시스템의 모든 고리는 여전히 각자의 회전축으로 자유롭게 회전할 수 있다. 그러면 왜 락이라는 표현을 썼을까.
3-2-1 오일러각 방식에 따르면 이제 \(\hat{n}_1\) 축을 중심으로 \(\phi\)만큼 회전하는 것만 남았다. 그러면 최종적인 좌표계 \(\{b\}\)로 변환할 수 있다. \(\hat{n}_1\) 축은 \(\hat{b}_1\) 축으로 이름만 바뀌고, \(\hat{n}_2\) 축은 \(\hat{b}_2\) 축으로 \(\hat{n}_3\) 축은 \(\hat{b}_3\) 축으로 변환된다.

여기까지 통상적인 3-2-1 오일러각 방식으로 좌표계 \(\{a\}\)에서 좌표계 \(\{b\}\)로 무사히 좌표변환했다. 도대체 \(\theta=90\)도인 것이 무슨 문제를 일으켰다는 것인가.
짐벌 시스템은 가장 안쪽 고리(파랑색)의 회전축에 자이로스코프나 가속도계와 같은 관성센서나 카메라 등의 기기나 물체를 장착하여 짐벌 시스템이 설치된 외부 지지대가 움직이더라도 이 기기가 일정한 방향을 지시하게 하거나 또는 수평을 유지시키는 목적으로 사용된다. 3 자유도 짐벌 시스템은 기본적으로 짐벌에 장착된 기기를 어떠한 자세각으로도 연속적으로 변환시킬 수 있다. 단, \(\theta=\pm 90\)도인 짐벌락 상황만 빼고 말이다.
\(\theta=90\)도일 때의 짐벌을 다시 살펴보자. 두 개의 회전축이 한 개로 합쳐져 있어서 이 상태에서 가장 안쪽 고리(또는 파랑색 고리의 회전축에 장착된 기기)는 \(\hat{b}_1\) 과 \(\hat{b}_2\) 등 두 축으로 밖에 회전하지 못한다. 나머지 방향으로의 회전은 잠겨있다. 즉, 락(lock)되어 있다. 예를 들어 아래 그림의 오른쪽과 같은 자세로 직접 움직이지 못한다. 그 방향으로 회전하려면 \(\hat{b}_3\) 을 중심으로 회전시켜야 하는데 물리적으로 불가능하다.

굳이 그 자세로 만들기 위해서는 일단 가운데 고리(녹색)을 먼저 회전시켜서 잠금 상태를 풀고, 나머지 고리를 적절히 회전시켜서 갈 수밖에 없다. 만약 짐벌에 카메라를 장착하고 피사체를 추적하는 상황에서 짐벌락이 발생하면 불연속적인 카메라의 움직임으로 피사체를 놓칠 지도 모른다. 짐벌에 레이다 안테나를 장착해서 적기를 추적하는 상황이라면 적기를 놓칠 수 있다. 짐벌에 관성센서를 장착하여 항공기의 위치와 자세를 계산하는 중이었다면 큰 오류가 생길 것이다.
수학적으로 \(\theta= \pm 90^o\)는 특이점(singularity)에 해당한다. 좌표변환이 시간에 따라 변화하면, 또는 강체의 자세가 시간에 따라 변화하면, 좌표계의 각속도 또는 강체의 각속도가 0이 아니다. 그러면 각속도와 오일러각 변화율간에 수학적인 관계식이 생기는데 이 때 \(\theta= \pm 90^o\)이면, 관계식에서 분모가 0이 되어 버린다. 특이점인 것이다. 이에 대해서는 다음에 알아보고자 한다.
정리하면, 오일러각 방식의 좌표변환 방법의 큰 단점은 특이점 또는 짐벌락이 존재한다는 것이고, 이것은 연속적으로 자세의 움직임을 표현할 때 문제가 된다.
3-2-1 오일러각 방식은 특이점이 존재하므로 이용에 제약이 따른다. 오일러각 방식에는 24가지가 있다고 했는데 그렇다면 다른 회전 순서를 갖는 오일러각은 어떨까. 마찬가지로 모두 특이점이 존재한다. 오일러각 방법은 3개의 파라미터로 좌표변환을 표현할 수 있는 경제성이 있는 반면에 이에 따른 대가가 있는 것이다.
방향코사인행렬, 오일러각, 그리고 쿼터니언
<b>“좌표계간의 상호 변환관계를 말하다”</b> <b>“물체의 자세 변화를 수학적으로 표현하고 싶은 개발자를 위한 책”</b> 이 책은 방향코사인행렬, 오일러각, 쿼터니언과 이들의 시간 변화율에
digital.kyobobook.co.kr
'항공우주 > 동역학' 카테고리의 다른 글
| 좌표변환 방법 비교 (0) | 2021.02.08 |
|---|---|
| 쿼터니언 (Quaternions) (0) | 2021.02.08 |
| 오일러각 (Euler Angles) (0) | 2021.02.07 |
| 방향코사인행렬 (DCM) (1) | 2021.02.06 |
| 벡터를 직교 좌표계로 표현하기 (0) | 2021.02.05 |




댓글