주파수 응답(frequency response)은 안정한 LTI(선형 시불변) 시스템에 싸인 또는 코사인 파형(sinusoids) 입력을 가했을 때 나오는 정정상태 응답(steady-state response)이다.
입력 \(u(t)\) 가 시스템에 가해지는 시간이 \(t=0\) 이라면 초기값이 \(0\) 이라는 가정하에서 인과(causal) LTI 시스템의 출력은 다음과 같다.
\[ \begin{align} y(t) &= \int_0^t h(t-\tau) u(\tau) \ d\tau \tag{1} \\ \\ &= \int_0^t h(\tau) u(t-\tau) \ d\tau \end{align} \]
여기서 \(h(t)\) 는 LTI 시스템의 임펄스 반응(impulse response)이다.
이제 입력이 다음과 같이 진폭이 \(A\) 이고 주파수가 \(\omega\) 인 sinusoids라고 하자.
\[ u(t)=A e^{j \omega t}, \ \ \ \ t \ge 0 \tag{2} \]
그러면 출력 \(y(t)\) 는 다음과 같이 계산된다.
\[ \begin{align} y(t) &= \int_0^t h(\tau) A e^{j \omega (t-\tau) } \ d\tau \tag{3} \\ \\ &= \int_0^\infty h(\tau) A e^{j \omega (t-\tau) } \ d\tau - \int_t^\infty h(\tau) A e^{j \omega (t-\tau) } \ d\tau \\ \\ &= \left( \int_0^\infty h(\tau) e^{-j \omega \tau } \ d\tau \right) A e^{j\omega t} - \left( \int_t^\infty h(\tau) e^{-j \omega \tau } \ d\tau \right) A e^{j\omega t} \end{align} \]
여기서 전달함수(transfer function)의 정의에 의하면,
\[ H(s)= \mathfrak{L} \left[ h(t) \right]= \int_0^\infty h(t) e^{-st} \ dt \tag{4} \]
이므로 식 (3)은 다음과 같이 쓸 수 있다.
\[ y(t)= H(j\omega) A e^{j\omega t} - \left( \int_t^\infty h(\tau) e^{-j \omega \tau } \ d\tau \right) A e^{j\omega t} \tag{5} \]
식 (5)에서 \(H(j\omega)\) 는 \(h(t)\) 의 라플라스 변환(Laplace transform) \(H(s)\) 에서 \(s=j\omega \) 로 치환한 것이다. 또한 식 (5)에서 다음 부등식이 성립한다.
\[ \begin{align} \left| \int_t^\infty h(\tau) e^{-j \omega \tau } \ d\tau \ e^{j\omega t} \right| & = \left| \int_t^\infty h(\tau) e^{-j \omega \tau } \ d\tau \right| \ \left| e^{j\omega t} \right| \tag{6} \\ \\ & \le \int_t^\infty \left| h(\tau) \right| \ \left| e^{-j \omega \tau } \right| \ d\tau \\ \\ &= \int_t^\infty \left| h(\tau) \right| \ d\tau \end{align} \]
시스템이 BIBO(Bounded Input Bounded Output)라면,
\[ \int_0^\infty \vert h(t) \vert \ dt \lt \infty \tag{7} \]
이 성립하므로 \(t \to \infty\) 일 때,
\[ \left| \int_t^\infty h(\tau) e^{-j \omega \tau } \ d\tau \ e^{j\omega t} \right| \to 0 \tag{8} \]
이 된다. 따라서 식 (5)에서 \(t \to \infty\) 일 때의 응답, 즉 정정상태 응답은 다음과 같이 된다.
\[ y(t) = H(j\omega)A e^{j\omega t} \tag{9} \]
식 (9)에 의하면 주파수 응답은 \(H(j\omega)\) 만 알면 계산할 수 있기 때문에, \(H(j\omega)\) 를 시스템의 ‘주파수 응답’이라고 하기도 한다.
주파수 응답의 예를 들어 보자.
시스템의 전달함수가 \(H(s)= \frac{1}{(s+1)}\) 일 때, 입력이 \(u(t)= \sin (0.5t) \)라면,

주파수 응답은 다음과 같고,
\[ H(j0.5) = \frac{1}{(j0.5+1)} \]
정정상태 응답은 다음과 같이 된다.
\[ \begin{align} y(t) &= \mathit{Im} \left[ H(j0.5) e^{j0.5t} \right] \\ \\ &= \left\vert H(j0.5) \right\vert \sin (0.5t+\angle H(j0.5)) \end{align} \]
여기서 \(\mathit{Im}\)은 복소수의 허수부를 뜻하고,
\[ \begin{align} & \left\vert H(j0.5) \right\vert = \left\vert \frac{1}{(j0.5+1)} \right\vert \approx 0.9 \\ \\ & \angle H(j0.5) = -\tan^{-1} 0.5 \approx -26.6^o \end{align} \]
이다. 따라서 정정상태 응답은 다음과 같이 된다.
\[ y(t) \approx 0.9 \sin(0.5t-26.6^o ) \]
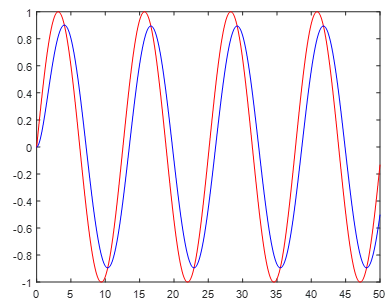
위 그림에서 빨강색이 입력, 파랑색이 응답이다.
'유도항법제어 > 비행제어' 카테고리의 다른 글
| [Continuous-Time] LTI 시스템과 컨볼루션 (0) | 2022.09.13 |
|---|---|
| [Continuous-Time] LTI 시스템 (0) | 2022.09.13 |
| 정정상태 응답과 과도 응답 (0) | 2021.02.05 |
| 진동 모드 해석 (0) | 2021.01.26 |
| 운동 모드 해석 (0) | 2021.01.26 |




댓글