시스템은 어떤 입력에 대해서 반응하여 동작하는 장치나 구성품의 집합을 뜻한다. 시스템의 반응을 출력 또는 응답이라고 한다. 시스템은 꼭 물리적인 장치나 구성품 또는 하드웨어일 필요는 없고, 알고리즘 또는 소프트웨어일 수도 있다. 아니면 사회경제 제도일 수도 있다. 세상에는 무인기 시스템, 제어 시스템, 금융 시스템 등등 많은 시스템이 있다.
제어 대상 시스템을 수학적으로 표현하는 방법에는 두 가지가 있다. 입력과 출력의 관계식으로 표현하는 방법과 상태공간(state-space) 방정식으로 표현하는 방법이다.
입력과 출력의 관계식으로 표현하는 방법을 시스템의 외부적 표현 방법이라고도 하는데 다음과 같이 연산자(operator)를 이용하여 입출력 관계식을 함수로 나타낸다.
\[ \mathbf{y}(t)= \mathcal{F} \{ \mathbf{u}(t),t \} \]
여기서 \(\mathbf{u}(t)\)는 시간 \(t\)를 변수로 하는 함수로서 입력 또는 제어입력이라고 한다. 참고로 여기서는 연속시간에 대해서만 다룬다. 따라서 \(t\)는 실수(real number)다.

입력의 개수가 \(m\)개라면 \(\mathbf{u}(t)\)를 다음과 같이 벡터로 표시한다.
\[ \mathbf{u}(t)= \begin{bmatrix} u_1(t) \\ u_2(t) \\ \vdots \\ u_m(t) \end{bmatrix} \]
\(\mathbf{y}(t)\)는 시간 \(t\)를 변수로 하는 함수로서 출력 또는 시스템의 반응이라고 한다. 출력의 개수가 \(p\)개라면 \(\mathbf{y}(t)\)를 다음과 같이 벡터로 표시한다.
\[ \mathbf{y}(t)= \begin{bmatrix} y_1(t) \\ y_2(t) \\ \vdots \\ y_p(t) \end{bmatrix} \]
\(\mathcal{F}\)는 시스템 또는 연산자로서 입력 \(\mathbf{u}(t)\)와 출력 \(\mathbf{y}(t)\) 사이의 관계식을 나타낸다. 예를 들면 다음과 같은 수식이 시스템을 입출력 관계식으로 표현한 것이다.
\[ \mathbf{y}(t)=\int_{t_0}^t G (t,\tau) \mathbf{u}(\tau) \ d\tau \]
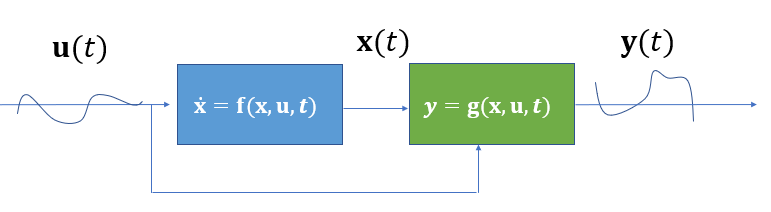
상태공간 방정식으로 표현하는 방법을 내부적 표현 방법이라고도 하는데 다음과 같이 상태변수를 이용한 1차 벡터 미분 방정식과 출력에 관한 대수 방정식으로 시스템을 표현한다.
\[ \begin{align} \dot{\mathbf{x}}(t) &= \mathbf{f}( \mathbf{x}(t), \mathbf{u}(t), t), \ \mathbf{x}(t_0 )=\mathbf{x}_0 \\ \\ \mathbf{y}(t) &= \mathbf{g}( \mathbf{x}(t), \mathbf{u}(t),t) \end{align} \]
여기서 \(\mathbf{x}(t)\)는 시간 \(t\)를 변수로 하는 함수로서 상태변수라고 한다.
상태변수의 개수가 \(n\)개라면 \(\mathbf{x}(t)\)를 다음과 같이 벡터로 표시한다.
\[ \mathbf{x}(t)= \begin{bmatrix} x_1(t) \\ x_2(t) \\ \vdots \\ x_n(t) \end{bmatrix} \]
시스템의 상태변수는 시스템의 운동을 기술하는 데 필요한 모든 관련 정보를 포함하고 있는 변수다. 예를 들어, 항공기 시스템에서의 상태변수는 항공기의 위치, 속도 등 운동학적 특성과 관련된 변수를 포함하고 있으며, 금융 시스템에서는 통화의 흐름, 금리 등과 관련된 정보가 상태변수에 포함될 수 있다.
상태변수에 관한 식은 1차 미분 방정식으로 주어졌으므로 시간의 시작점에서의 값이 필요하다. 이 값을 상태변수의 초기값이라고 한다. 원칙적으로 시간의 시작점은 \(t=-\infty\)로 할 수도 있으나 현실적으로는 시작점을 \(t=t_0\)로 표시한다. 식에서는 상태변수의 초기값이 \( \mathbf{x}(t_0 )=\mathbf{x}_0\) 로 주어졌다.
시간 \(t=t_0\)에서 상태변수의 초기값과 그 시간 이후 \(t \ge t_0\)에서의 입력 \(\mathbf{u}(t)\)가 주어지면 시간 \(t \ge t_0\)에서의 출력 \(\mathbf{y}(t)\)를 계산할 수 있다. 즉 초기값이 주어진 이전의 시간 \(t \lt t_0\)에서는 입력 \(\mathbf{u}(t)\)에 대해서는 알 필요가 없다. 이런 이유로 상태변수의 초기값은 미래의 출력 값에 영향을 미치는 과거의 입력 값에 대한 정보를 모두 포함했다고 본다.
상태변수가 1차 미분 방정식으로 주어져서 활용이 제한적인 것처럼 보이지만 고차 미분 방정식도 일련의 1차 미분 방정식의 집합으로 표현될 수 있기 때문에 상태공간 방정식은 범용적인 표현 방식이다.
'유도항법제어 > 비행제어' 카테고리의 다른 글
| 정정상태 응답과 과도 응답 (0) | 2021.02.05 |
|---|---|
| 진동 모드 해석 (0) | 2021.01.26 |
| 운동 모드 해석 (0) | 2021.01.26 |
| [Continuous-Time] 선형 시스템 (0) | 2021.01.10 |
| 안티 와인드업 (Anti-Windup) (0) | 2021.01.09 |




댓글