CR3BP의 선형화된 운동방정식을 이용하여 라그랑지 포인트(Lagrange point) L4 및 L5 포인트는 (중립) 안정 평형점이지만, L1, L2 및 L3 포인트는 불안정한 평형점이라는 것을 확인했다 (https://pasus.tistory.com/271).
하지만 L1, L2 및 L3 포인트의 고유값(eigenvalue) 분석에 의하면 평형점 주위에 주기 궤도(periodic orbit)가 존재함을 시사한다. 즉 특정한 초기조건을 설정하면 불안정한 운동 모드를 배제하고 주기 운동을 하는 모드만을 나타나게 할 수가 있다.

라그랑지 포인트에서의 선형화 운동방정식은 다음과 같다.
\[ \begin{align} & \delta \ddot{x}-2 \delta \dot{y} = -\bar{U}_{xx} \delta x- \bar{U}_{xy} \delta y \tag{1} \\ \\ & \delta \ddot{y}+2 \delta \dot{x}= - \bar{U}_{xy} \delta x- \bar{U}_{yy} \delta y \\ \\ & \delta \ddot{z}=- \bar{U}_{zz} \delta z \end{align} \]
L1, L2 및 L3 포인트에서는 \(\bar{U}_{xx}, \ \bar{U}_{xy}, \ \bar{U}_{yy}, \ \bar{U}_{zz}\) 가 각각 다음과 같이 계산된다.
\[ \begin{align} & \bar{U}_{xx}=-1-2c_2 \tag{2} \\ \\ & \bar{U}_{yy}=-1+c_2 \\ \\ & \bar{U}_{xy}=0 \\ \\ & \bar{U}_{zz}=c_2 \\ \\ & c_2= \frac{(1-\mu)}{|x_0+\mu|^3 } + \frac{\mu}{( |x_0+\mu-1|^3 } \end{align} \]
식 (2)를 식 (1)에 대입하면 다음과 같이 된다.
\[ \begin{align} & \delta \ddot{x}-2 \delta \dot{y} -(1+2c_2 ) \delta x=0 \tag{3} \\ \\ & \delta \ddot{y}+2 \delta \dot{x} + (-1+c_2 ) \delta y=0 \\ \\ & \delta \ddot{z} + c_2 \delta z=0 \end{align} \]
여기서 \(c_2 \gt 1\) 이다. 식 (3)에서 \(\delta z\) 방정식은 \(\delta x, \ \delta y\) 방정식과 독립적이므로 별도로 계산할 수 있다.
\[ \delta z(t)=A_z \sin (\omega_v t+ \psi) \tag{4} \]
여기서 \(\omega_v^2=c_2\) 이다. \(A_z\) 와 \(\psi\) 는 섭동량 \(\delta z\) 의 초기조건에 의해서 결정되는 상수이다.
식 (3)에서 \(\delta x, \ \delta y\) 운동은 결합되어 있기 때문에 다음과 같이 벡터 형식으로 바꾸는 것이 편리하다.
\[ \dot{\mathbf{w}}=A \mathbf{w} \tag{5} \]
여기서
\[ A= \begin{bmatrix} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ (1+2c_2) & 0 & 0 & 2 \\ 0 & (1-c_2) & -2 & 0 \end{bmatrix}, \ \ \ \ \ \mathbf{w}= \begin{bmatrix} \delta x \\ \delta y \\ \delta v_x \\ \delta v_y \end{bmatrix} \]
식 (5)에서 행렬 \(A\) 의 고유값을 구해보자. 먼저 특성방정식은 다음과 같으므로
\[ \begin{align} \det (A-\lambda I) &= \det \begin{bmatrix} -\lambda & 0 & 1 & 0 \\ 0 & -\lambda & 0 & 1 \\ (1+2c_2) & 0 & -\lambda & 2 \\ 0 & (1-c_2) & -2 & -\lambda \end{bmatrix} \tag{6} \\ \\ & = \lambda^4+(2-c_2 ) \lambda^2+(1+c_2-2c_2^2 ) \\ \\ & =0 \end{align} \]
고유값은 다음과 같다.
\[ \begin{align} & \lambda_1^2= \frac{c_2-2+ \sqrt{9c_2^2-8c_2 } }{2 } \ \ \gt 0 \tag{7} \\ \\ & \lambda_3^2= \frac{c_2-2- \sqrt{9c_2^2-8c_2 } }{2 } \ \lt 0 \end{align} \]
식 (7)에 의하면 행렬 \(A\) 의 고유값은 두개의 실수 \(\lambda_{1,2}= \pm \lambda\) 와 두개의 허수 \(\lambda_{3,4}= \pm j \omega_p\) 를 갖는다. 각 고유값에 해당하는 고유벡터(eigenvector)를 구하기 위하여 고유값 \(\alpha\) 에 해당하는 고유벡터를 \(\mathbf{v}=[v_1 \ \ v_2 \ \ v_3 \ \ v_4 ]^T\) 라고 하자. 그러면 다음식이 성립한다.
\[ \begin{bmatrix} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ (1+2c_2) & 0 & 0 & 2 \\ 0 & (1-c_2) & -2 & 0 \end{bmatrix} \begin{bmatrix} v_1 \\ v_2 \\ v_3 \\ v_4 \end{bmatrix} = \alpha \begin{bmatrix} v_1 \\ v_2 \\ v_3 \\ v_4 \end{bmatrix} \tag{8} \]
위 식을 전개하면 다음과 같은 관계식을 갖는다.
\[ \begin{align} & v_3= \alpha v_1, \ \ \ v_4= \alpha v_2 \tag{9} \\ \\ & (1+2c_2 ) v_1+2v_4= \alpha v_3, \ \ \ (1-c_2) v_2-2v_3=\alpha v_4 \end{align} \]
만약 \(v_1=0\) 이면 \(v_2=v_3=v_4=0\) 이 되므로 \(v_1 \ne 0\) 이어야 한다. \(v_1=1\) 로 놓으면 식 (9)에 의해서 고유벡터는 다음과 같이 된다.
\[ \mathbf{v} = \begin{bmatrix} 1 \\ v_2 \\ \alpha \\ \alpha v_2 \end{bmatrix} \tag{10} \]
이제 고유값이 \(\pm \lambda\) 일 때 고유벡터 \(\mathbf{v}_1, \ \mathbf{v}_2\) 는 다음과 같이 계산할 수 있다.
\[ \mathbf{v}_1 = \begin{bmatrix} 1 \\ v_2 \\ \lambda \\ \lambda v_2 \end{bmatrix}, \ \ \ \mathbf{v}_2 = \begin{bmatrix} 1 \\ v'_2 \\ -\lambda \\ -\lambda v'_2 \end{bmatrix} \tag{11} \]
여기서
\[ \begin{align} & (1+2c_2 )+2\lambda v_2= \lambda^2, \ \ \ (1-c_2) v_2-2\lambda = \lambda^2 v_2 \\ \\ & (1+2c_2 )-2\lambda v'_2= \lambda^2, \ \ \ (1-c_2) v'_2+2 \lambda= \lambda^2 v'_2 \end{align} \]
이므로 \(v_2=-v'_2\) 임을 알 수 있다. 따라서
\[ v_2=-v'_2= \frac{-2 \lambda }{\lambda^2+c_2-1}= \frac{\lambda^2-(1+2c_2)}{2 \lambda} \tag{12} \]
이다. 식 (12)를 식 (11)에 대입하면 고유값이 \(\pm \lambda\) 일 때 고유벡터 \(\mathbf{v}_1, \ \mathbf{v}_2\) 는 다음과 같이 쓸 수 있다.
\[ \mathbf{v}_1 = \begin{bmatrix} 1 \\ v_2 \\ \lambda \\ \lambda v_2 \end{bmatrix}, \ \ \ \mathbf{v}_2 = \begin{bmatrix} 1 \\ -v_2 \\ -\lambda \\ \lambda v_2 \end{bmatrix} \tag{13} \]
한편 고유값이 \(\pm j \omega_p\) 일 때 고유벡터 \(\mathbf{v}_3, \ \mathbf{v}_4\) 는 다음과 같이 계산할 수 있다.
\[ \mathbf{v}_3 = \begin{bmatrix} 1 \\ v''_2 \\ j \omega_p \\ j \omega_p v''_2 \end{bmatrix}, \ \ \ \mathbf{v}_4 = \begin{bmatrix} 1 \\ v'''_2 \\ -j \omega_p \\ -j \omega_p v'''_2 \end{bmatrix} \tag{14} \]
여기서
\[ \begin{align} & (1+2c_2 )+2j \omega_p v''_2=- \omega_p^2, \ \ \ (1-c_2) v''_2+2j \omega_p=- \omega_p^2 v''_2 \\ \\ & (1+2c_2 )-2j \omega_p v'''_2=- \omega_p^2, \ \ \ (1-c_2) v'''_2-2j \omega_p=- \omega_p^2 v'''_2 \end{align}\]
이므로 \(v''_2=-v'''_2\) 임을 알 수 있다. 따라서
\[ v''_2=-v'''_2=- j\frac{2 \omega_p}{ \omega_p^2-c_2+1}= j \frac{\omega_p^2+(1+2c_2 )}{2 \omega_p }=j \kappa \tag{15} \]
이다. 식 (15)를 식 (14)에 대입하면 고유값이 \(\pm j \omega_p\) 일 때 고유벡터 \(\mathbf{v}_3, \ \mathbf{v}_4\) 는 다음과 같이 쓸 수 있다.
\[ \begin{align} & \mathbf{v}_3 = \begin{bmatrix} 1 \\ j \kappa \\ j \omega_p \\ -\omega_p \kappa \end{bmatrix} = \begin{bmatrix} 1 \\ 0 \\ 0 \\ -\omega_p \kappa \end{bmatrix} + j \begin{bmatrix} 0 \\ \kappa \\ \omega_p \\ 0 \end{bmatrix} = \mathbf{v}_R+j \mathbf{v}_I \tag{16} \\ \\ & \mathbf{v}_4 = \begin{bmatrix} 1 \\ -j \kappa \\ -j \omega_p \\ -\omega_p \kappa \end{bmatrix} = \begin{bmatrix} 1 \\ 0 \\ 0 \\ -\omega_p \kappa \end{bmatrix} - j \begin{bmatrix} 0 \\ \kappa \\ \omega_p \\ 0 \end{bmatrix} = \mathbf{v}_R -j \mathbf{v}_I \end{align} \]
실수 고유값에 해당하는 고유벡터 \(\mathbf{v}_1, \ \mathbf{v}_2\) 는 각각 안정 부분공간(stable subspace)과 불안정 부분공간의 기저벡터, 허수 고유값에 해당하는 고유벡터 \(\mathbf{v}_R, \ \mathbf{v}_I\) 는 센터(center) 부분공간의 기저벡터이다.
각 부분공간의 고유벡터로 변환행렬 \(T\) 를 다음과 같이 정의하면
\[ T = \begin{bmatrix} \mathbf{v}_1 & \mathbf{v}_2 & \mathbf{v}_R & \mathbf{v}_I \end{bmatrix} \tag{17} \]
식 (1)의 상태벡터 \(\mathbf{w}\) 를 다음과 같이 상태벡터 \(\mathbf{a}\) 로 변환할 수 있다 (https://pasus.tistory.com/233).
\[ \begin{align} & \dot{\mathbf{a}} = T^{-1} AT \mathbf{a} =D \mathbf{a} \tag{18} \\ \\ \to \ & \begin{bmatrix} \dot{a}_1 \\ \dot{a}_2 \\ \dot{a}_3 \\ \dot{a}_4 \end{bmatrix} =\begin{bmatrix} \lambda & 0 & 0 & 0 \\ 0 & -\lambda & 0 & 0 \\ 0 & 0 & 0 & \omega_p \\ 0 & 0 & -\omega_p & 0 \end{bmatrix} \begin{bmatrix} a_1 \\ a_2 \\ a_3 \\ a_4 \end{bmatrix} \end{align} \]
식 (18)로 주어지는 \(\mathbf{a}\) 의 해는 다음과 같다.
\[ \begin{align} & a_1 (t)=a_{10} e^{\lambda t} \tag{19} \\ \\ & a_2 (t)=a_{20} e^{-\lambda t} \\ \\ & a_3 (t)=a_{30} \cos \omega_p t +a_{40} \sin \omega_p t \\ \\ & a_4 (t)=-a_{30} \sin \omega_p t +a_{40} \cos \omega_p t \end{align} \]
여기서 \(a_{10}, \ a_{20}, \ a_{30}, \ a_{40}\) 은 초기값이다. 식 (19)에 의하면 라그랑지 포인트에 대한 선형 운동을 \((a_1-a_2)\) 좌표로 투사시키면 L1, L2, L3 포인트는 안장점(saddle point)이 되고, \((a_3-a_4)\) 좌표로 투사시키면 중심점(center point)이 됨을 알 수 있다. 그래서 L1, L2, L3 포인트를 안장-중심 평형점(saddle-center equilibrium point)이라고 하기도 한다.
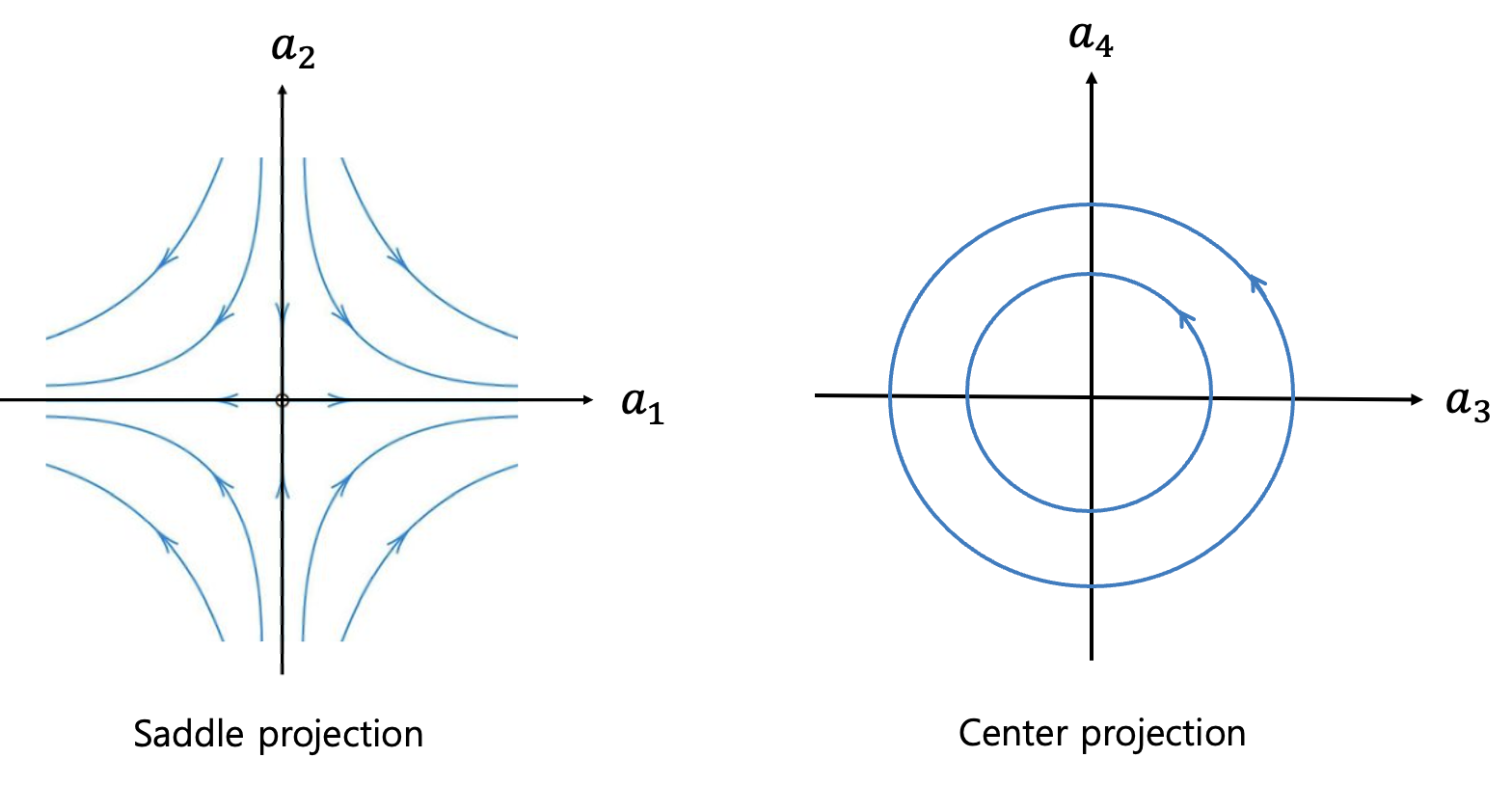
또한 식 (19)에 의하면 초기값을 불안정 운동을 배제하도록 잘 설정한다면, 즉 \(a_1=a_2=0\) 이 된다면 라그랑지 포인트를 중심으로 하는 주기 궤도(periodic orbit) 운동이 가능함을 알 수 있다. 그리고 L1, L2, L3 포인트에 대한 선형화 운동은 전체적으로 불안정하지만 \(a_{10}=0\) 이면 궤도 운동이 안정할 수 있다는 것을 알 수 있다.

추가적으로 안장점 투사 그림에 의하면 라그랑지 포인트 주변 영역을 통과(transit)하는 궤도와 통과하지 않는 비통과(non-transit) 궤도도 존재함을 알 수 있다.
'항공우주 > 우주역학' 카테고리의 다른 글
| 미분보정 (Differential Correction) (0) | 2023.07.03 |
|---|---|
| [CR3BP] 리야프노프 궤도, 헤일로 궤도, 그리고 리사주 궤도 (0) | 2023.06.27 |
| [CR3BP] 라그랑지 포인트 안정성 해석 (0) | 2023.06.22 |
| [CR3BP] 힐의 영역 (Hill’s Region) (0) | 2023.06.19 |
| 상대 궤도요소의 섭동 (Perturbed Relative Orbital Elements) (0) | 2023.03.06 |




댓글