미분보정(differential correction)은 슈팅방법(shooting method)으로도 불린다. 기본적으로 미분방정식의 경계값 문제(boundary value problem)를 초기값 문제(initial value problem)로 바꾸어 해를 구하는 방법이다.
다음과 같은 비선형 미분방정식이 있다.
\[ \dot{\mathbf{x}}(t)= \mathbf{f}(\mathbf{x}(t)) \tag{1} \]
여기서 초기값 \(\mathbf{x}(t_0 )\) 은 일부만 주어지거나 또는 주어지지 않았다고 가정한다. 대신 정해진 시간 \(t_f\) 에서 경계값 \(\mathbf{x}_d\) 가 주어졌다고 가정한다. 문제는 시간 \(t_f\) 에서 \(\mathbf{x}(t_f )=\mathbf{x}_d \) 가 되도록 초기값 \(\mathbf{x}(t_0 )\) 을 구하는 것이다.
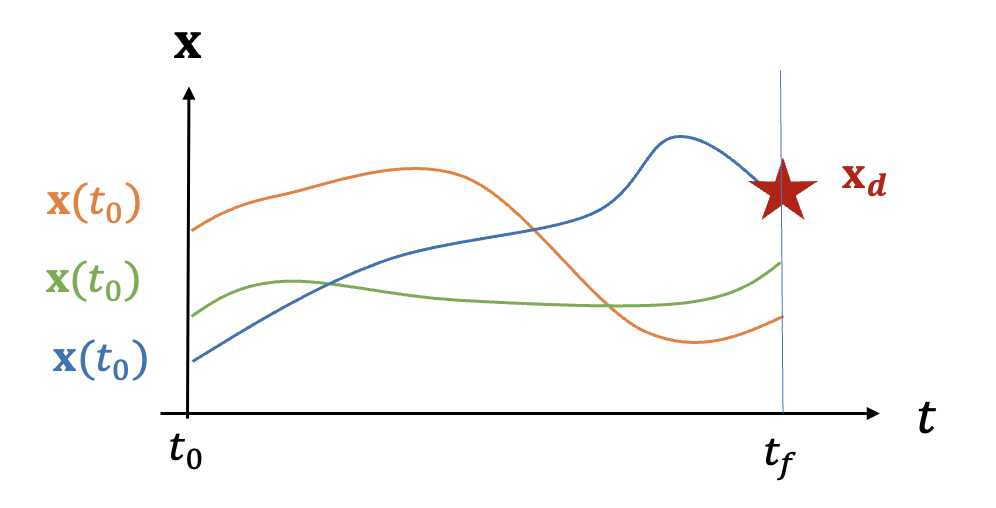
경계값 문제의 경우 초기값이 다 주어지지 않았으므로 시간 전파를 하며 수치적분을 수행할 수가 없다. 대신 주어지지 않은 초기값을 적당히 추정한 다음에 초기값 문제를 풀 듯이 순차적으로 시간 전파해야 한다. 그리고 시간이 \(t_f\) 일 때 \(\mathbf{x}(t_f )\) 를 \(\mathbf{x}_d\) 와 비교해서 오차가 있다면 그 오차를 바탕으로 초기값 \(\mathbf{x}(t_0 )\) 를 다른 값으로 조정해 본다. 그리고 다시 이 값을 초기값 삼아 시간 전파하는 것이다. 이것을 \(\mathbf{x}(t_f )=\mathbf{x}_d\) 가 될 때까지 반복하는 방법을 미분보정 또는 슈팅방법이라고 한다.
초기값 \(\mathbf{x}(t_0 )\) 일 때 식 (1)의 해 또는 궤적을 \(\mathbf{x}(t)\) 로 표현하자. 또한 원래 초기값에 섭동을 준 새로운 초기값 \(\mathbf{x}(t_0 )+\delta \mathbf{x}(t_0 )\) 에서 시작된 궤적을 \(\tilde{\mathbf{x}}(t)\) 로 표현하자.
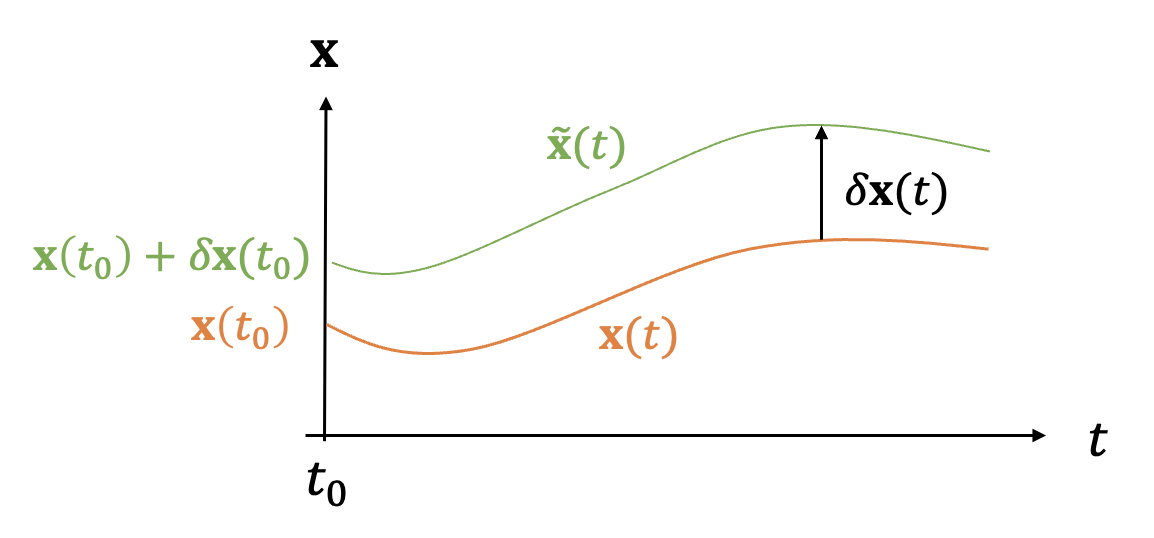
러면 두 궤적 사이의 차이는 다음과 같다.
\[ \delta \mathbf{x}(t)= \tilde{\mathbf{x}} (t)- \mathbf{x} (t) \tag{2} \]
만약 초기값의 섭동 \(\delta \mathbf{x}(t_0 )\) 가 매우 작다면 두 궤적 사이의 차이 \(\delta \mathbf{x}(t)\) 도 작다고 가정할 수 있으므로 테일러 시리즈 1차항에서 절삭한 \(\delta \mathbf{x}(t)\) 의 미분방정식을 다음과 같이 표현할 수 있다.
\[ \begin{align} \delta \dot{\mathbf{x}}(t) &= \dot{\tilde{\mathbf{x}}}(t)- \dot{\mathbf{x}}(t)= \mathbf{f}(\tilde{\mathbf{x}}(t))-\mathbf{f}(\mathbf{x}(t)) \tag{3} \\ \\ &= \mathbf{f}(\mathbf{x}(t)+\delta \mathbf{x}(t))-\mathbf{f}(\mathbf{x}(t)) \\ \\ &= \mathbf{f}(\mathbf{x}(t))+ \left. \frac{\partial \mathbf{f} }{ \partial \mathbf{x} } \right|_{\mathbf{x}(t)} \delta \mathbf{x}(t)+HOT - \mathbf{f}(\mathbf{x}(t)) \\ \\ & \approx \left. \frac{\partial \mathbf{f} }{ \partial \mathbf{x} } \right|_{\mathbf{x}(t)} \delta \mathbf{x}(t) \\ \\ &=A(t) \delta \mathbf{x}(t) \end{align} \]
여기서 자코비안 \(\frac{\partial \mathbf{f}}{\partial \mathbf{x}}\) 는 궤적 \(\mathbf{x}(t)\) 를 따라서 계산해야 하기 때문에 시간 함수 \(A(t)\) 가 된다.
식 (3)은 선형 시변(linear time-varying) 방정식이므로 다음과 같이 상태천이행렬(state transition matrix)을 이용하여 해를 구할 수 있다(https://pasus.tistory.com/274).
\[ \delta \mathbf{x}(t)=\Phi (t, t_0 ) \delta \mathbf{x}(t_0) \tag{4} \]
그러면 초기값 \( \mathbf{x}(t_0 )+ \delta \mathbf{x}(t_0 )\) 로 시작한 상태변수 값이 시간 \(t_f\) 에서는 다음 값이 된다.
\[ \begin{align} \tilde{\mathbf{x}} (t_f) &= \mathbf{x}(t_f) + \delta \mathbf{x}(t_f) \tag{5} \\ \\ &= \mathbf{x}(t_f) + \Phi (t_f, t_0 ) \delta \mathbf{x}(t_0) \end{align} \]
\(\tilde{\mathbf{x}}(t_f )\) 값이 \(\mathbf{x}_d\) 가 되는 것이 목표이므로 위 식에서 초기값의 섭동 \(\delta \mathbf{x}(t_0)\) 을 다음과 같이 계산할 수 있다.
\[ \delta \mathbf{x}(t_0 )= \Phi^{-1} (t_f, t_0 ) [ \mathbf{x}_d- \mathbf{x}(t_f )] \tag{6} \]
식 (6)에 의하면 초기값 \(\mathbf{x}(t_0 )\) 를 \(\mathbf{x}(t_0 )+\delta \mathbf{x}(t_0 )\) 로 변경하면 테일러 시리즈 1차 근사의 정확도로 \(\tilde{\mathbf{x}} (t_f )\) 값이 \(\mathbf{x}_d\) 가 될 수 있음을 알 수 있다. 이것이 미분보정의 기본 프로세스이다. 즉, 시간 \(t_f\) 에서 목표값 \(\mathbf{x}_d\) 와 현재의 초기값으로 산출된 최종값 \(\mathbf{x}(t_f )\) 간의 차이를 이용하여 초기값을 수정하는 것이다.
결국 다음 식으로 수정된 초기값
\[ \mathbf{x} (t_0 ) \ \gets \ \mathbf{x}(t_0 )+ \Phi^{-1} (t_f, t_0 )[ \mathbf{x}_d- \mathbf{x}(t_f )] \tag{7} \]
을 이용하여 위 프로세스를 반복하면 \(\mathbf{x}(t_f )= \mathbf{x}_d\) 가 되는 초기값 \(\mathbf{x}(t_0 )\) 를 계산해 낼 수 있다.
우주역학 분야에서는 주로 섭동력을 받는 램버트 문제(Lambert's problem)나 또는 삼체문제에서 주기궤도(periodic orbit)를 설계하는 데에 미분보정이 사용되고 있다.
'항공우주 > 우주역학' 카테고리의 다른 글
| [CR3BP] 리야프노프 궤도 (Lyapunov Orbit) 계산 (0) | 2023.07.11 |
|---|---|
| [CR3BP] 주기궤도 (Periodic Orbit)의 조건 (0) | 2023.07.04 |
| [CR3BP] 리야프노프 궤도, 헤일로 궤도, 그리고 리사주 궤도 (0) | 2023.06.27 |
| [CR3BP] L1, L2 및 L3 포인트에서의 궤도 운동 (0) | 2023.06.25 |
| [CR3BP] 라그랑지 포인트 안정성 해석 (0) | 2023.06.22 |




댓글