지금까지 질량중심을 기준으로 강체(rigid body)의 운동방정식을 유도하였다. 이번에는 강체에 고정되어 있는 임의의 점 \(A\) 에 대해서 강체의 운동방정식을 유도해 보도록 하겠다.
임의의 점 \(A\) 에 대한 파티클 시스템(systems of particles)의 운동방정식은 다음과 같았다.
\[ \begin{align} & \sum_{j=1}^n \vec{F}_j = m \frac{^i d^2 \vec{r}_G}{dt^2} = m \frac{^i d \vec{v}_G }{dt} \tag{1} \\ \\ & \frac{^i d \vec{H}_A}{dt} = m \frac{^i d \vec{r}_{G/A}}{dt} \times \vec{v}_G + \sum_{j=1}^n \vec{M}_{jA} \tag{2} \\ \\ & \vec{H}_A = \sum_{j=1}^n \vec{r}_{j/A} \times m_j \vec{v}_j \\ \\ & T= \frac{1}{2} \sum_{j=1}^n m_j \frac{^i d \vec{r}_j }{dt} \cdot \frac{^id \vec{r}_j }{dt} \tag{3} \end{align} \]
여기서 \(G\) 는 질량중심점이다.

식 (1)~(3)의 합(sum) 기호를 적분 기호로 바꾸면 강체에 적용할 수 있다. 다음 그림과 같이 강체를 구성하는 미소(infinitesimal) 질점 \(dm\) 에 작용하는 미소 외력을 \(d\vec{F}\) 라고 하자. 그리고 강체에 고정되어 있는 임의의 점 \(A\) 를 원점으로 하고 강체에 고정된 좌표계를 좌표계 \(\{a\}\) 라고 하자.
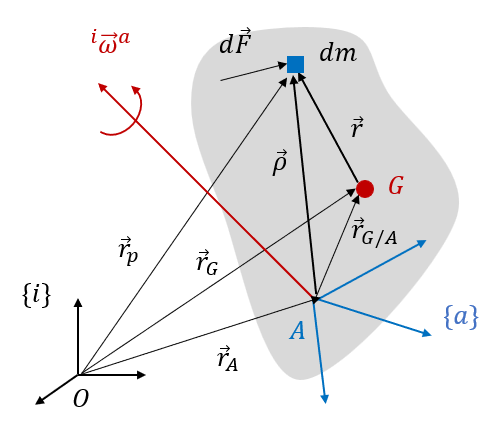
그림에서 \(\vec{r}_A\) 는 관성좌표계 \(\{i\}\) 의 원점에서 점 \(A\) 까지의 위치벡터, \(\vec{r}_G\) 는 관성좌표계 \(\{i\}\) 의 원점에서 질량중심까지의 위치벡터, \(\vec{r}_{G/A}\) 는 점 \(A\) 에서 질량중심 \(G\) 까지의 위치벡터, \(\vec{r}_p\) 는 관성좌표계의 원점에서 미소 질점 \(dm\) 까지의 위치벡터, \(\vec{r}\) 는 질량중심에서 미소 질점 \(dm\) 까지의 위치벡터, \(\vec{\rho}\) 는 좌표계 \(\{a\}\) 의 원점에서 미소 질점 \(dm\) 까지의 위치벡터이다.
그러면 임의의 점 \(A\) 와 질량중심 \(G\) 의 속도 관계식은 다음과 같다.
\[ \begin{align} \vec{v}_G &= \frac{^i d \vec{r}_G }{dt} = \frac{^i d \vec{r}_A}{dt} + \frac{^i d \vec{r}_{G/A}}{dt} \tag{4} \\ \\ &= \vec{v}_A+ \frac{^i d \vec{r}_{G/A}}{dt} \end{align} \]
BKE(Basic Kinematic Equation)를 적용하면 위 식은 다음과 같다.
\[ \vec{v}_G = \vec{v}_A+ {^i \vec{\omega}^a} \times \vec{r}_{G/A} \tag{5} \]
여기서 \(\vec{r}_{G/A}\) 는 좌표계 \(\{a\}\) 에서 고정된 벡터임을 이용하였다. 식 (1)과 (5)로부터 다음 식이 성립한다.
\[ \begin{align} \vec{F} &= \int d\vec{F} = m \frac{^i d\vec{v}_G}{dt} \tag{6} \\ \\ &=m \left( \frac{^i d \vec{v}_A}{dt} + \frac{^i d {^i\vec{\omega}^a}}{dt} \times \vec{r}_{G/A}+ {^i \vec{\omega}^a} \times \frac{^id \vec{r}_{G/A}}{dt} \right) \end{align} \]
BKE를 이용하면 식 (6)을 다음과 같이 전개할 수 있다.
\[ \vec{F}= m \left( \vec{a}_A+ \frac{^a d {^i\vec{\omega}^a}}{dt} \times \vec{r}_{G/A} + {^i\vec{\omega}^a} \times ({^i\vec{\omega}^a} \times \vec{r}_{G/A} ) \right) \tag{7} \]
여기서 \( \frac{^a d {^i\vec{\omega}^a}}{dt} \) 는 관성좌표계 \(\{i\}\) 에 대한 좌표계 \(\{a\}\) 의 각가속도 벡터다. \( {^i\vec{\omega}^a} \) 의 특성상 \( \frac{^i d {^i\vec{\omega}^a}}{dt} = \frac{^a d {^i\vec{\omega}^a}}{dt} \) 가 성립한다. 식 (7)을 병진 운동방정식(translational equation of motion)이라고 한다.
한편, 식 (2)로부터 강체에 작용하는 외력에 의해 생기는 점 \(A\) 에 관한 모멘트와 각운동량의 관계식을 얻을 수 있다.
\[ \begin{align} \vec{M}_A &= \int d\vec{M}_A = \int \vec{r} \times d \vec{F} \tag{8} \\ \\ &= \frac{^id \vec{H}_A}{dt} - m \frac{^i d \vec{r}_{G/A}}{dt} \times \vec{v}_G \\ \\ &= \frac{^i d \vec{H}_A}{dt}-m \frac{^id \vec{r}_{G/A}}{dt} \times \left( \vec{v}_A + \frac{^i d \vec{r}_{G/A}}{dt} \right) \\ \\ &= \frac{^i d \vec{H}_A}{dt} + \vec{v}_A \times m \frac{^id \vec{r}_{G/A}}{dt} \end{align} \]
식 (8)에서 강체의 점 \(A\) 에 대한 강체의 각운동량 \(\vec{H}_A\) 는 다음과 같이 구할 수 있다,
\[ \begin{align} \vec{H}_A &= \int \vec{\rho} \times \frac{^i d \vec{r}_p}{dt} dm \tag{9} \\ \\ &= \int \vec{\rho} \times \left( \frac{^ d \vec{r}_A}{dt} + \frac{^id \vec{\rho}}{dt} dm \right) \\ \\ &= \int ( \vec{r}_{G/A}+ \vec{r} ) dm \times \vec{v}_A + \int \vec{\rho} \times \frac{ ^i d \vec{\rho}}{dt} dm \\ \\ &= \vec{r}_{G/A} \times m \vec{v}_A+ \vec{H}_{A/A} \end{align} \]
여기서 BKE를 사용하여 \(\vec{H}_{A/A}\) 를 전개하면 다음과 같다.
\[ \vec{H}_{A/A} = \int \vec{\rho} \times \left( {^i \vec{\omega}^a} \times \vec{\rho} \right) dm \tag{10} \]
다음과 같은 관계식을 이용하면,
\[ \begin{align} \vec{\rho} \times ( {^i \vec{\omega}^b} \times \vec{\rho} ) &= ( \vec{\rho} \cdot \vec{\rho} ) {^i \vec{\omega}^a} - \vec{r} ( \vec{r} \cdot {^i \vec{\omega}^a } ) \tag{11} \\ \\ &= \left( \rho^2 \ \bar{U} - \vec{\rho} \ \vec{\rho} \right) \cdot {^i \vec{\omega}^a} \end{align} \]
식 (10)을 다음과 같이 간단하게 표기할 수 있다.
\[ \begin{align} \vec{H}_{A/A} &= \int \left( \rho^2 \ \bar{U} - \vec{\rho} \ \vec{\rho} \right) \cdot {^i \vec{\omega}^a} dm \tag{12} \\ \\ &= \bar{I}_A \cdot {^i\vec{\omega}^a} \end{align} \]
여기서 \(\rho = | \vec{\rho} |\) 이며,
\[ \bar{I}_A = \int \left( \rho^2 \bar{U} - \vec{\rho} \ \vec{\rho} \right) dm \tag{13} \]
이다. 식 (11)에서 \( \bar{U} \) 를 단위 다이아딕(unit dyadic)이라고 하며 좌표계 \(\{a\}\) 로 표현하면 다음과 같다.
\[ \bar{U} = \hat{a}_1 \hat{a}_1+\hat{a}_2 \hat{a}_2+\hat{a}_3 \hat{a}_3 \tag{14} \]
한편 식 (13)의 \( \bar{I}_A\) 를 점 \(A\) 에 관한 관성 다이아딕(inertia dyadic)이라고 한다.
식 (9)의 각운동량 \(\vec{H}_A\) 를 미분하고 BKE를 적용하면 다음과 같다.
\[ \begin{align} \frac{^id \vec{H}_A}{dt} &= \frac{^i d \vec{r}_{G/A}}{dt} \times m \vec{v}_A + \vec{r}_{G/A} \times m \vec{a}_A+ \frac{^id \vec{H}_{A/A}}{dt} \tag{15} \\ \\ &= ( {^i\vec{\omega}^a} \times \vec{r}_{G/A} ) \times m \vec{v}_A+ \vec{r}_{G/A} \times m \vec{a}_A \\ \\ & \ \ \ \ \ \ \ + \frac{^a d\vec{H}_{A/A}}{dt} + {^i\vec{\omega}^a} \times \vec{H}_{A/A} \end{align} \]
여기서 식 (12)를 이용하면 식 (15)는 다음과 같이 된다.
\[ \begin{align} \frac{^id \vec{H}_A}{dt} &= ( {^i\vec{\omega}^a} \times \vec{r}_{G/A} ) \times m \vec{v}_A+ \vec{r}_{G/A} \times m \vec{a}_A \tag{16} \\ \\ & \ \ \ \ \ \ \ + \bar{I}_A \cdot \frac{^a d {^i\vec{\omega}^a}}{dt} + {^i\vec{\omega}^a} \times ( \bar{I}_A \cdot {^i\vec{\omega}^a} ) \end{align} \]
이제 식 (16)을 (8)에 대입하면 모멘트 \(\vec{M}_A\) 의 식은 다음과 같이 된다.
\[ \begin{align} \vec{M}_A &= ( {^i\vec{\omega}^a} \times \vec{r}_{G/A} ) \times m \vec{v}_A+ \vec{r}_{G/A} \times m \vec{a}_A+ \bar{I}_A \cdot \frac{ ^a d {^i\vec{\omega}^a} }{dt} \tag{17} \\ \\ & \ \ \ \ \ \ \ + {^i\vec{\omega}^a} \times ( \bar{I}_A \cdot {^i\vec{\omega}^a} ) +\vec{v}_A \times m ( {^i\vec{\omega}^a} \times \vec{r}_{G/A} ) \\ \\ &= \vec{r}_{G/A} \times m \vec{a}_A+ \bar{I}_A \cdot \frac{^a d {^i \vec{\omega}^a}}{dt}+ {^i\vec{\omega}^a} \times ( \bar{I}_A \cdot {^i\vec{\omega}^a} ) \end{align} \]
식 (17)을 회전 운동방정식(rotational equation of motion)식이라고 한다.
이제, 식 (3)을 이용하여 강체의 운동에너지를 구해보자. 식 (3)을 강체에 적용하면,
\[ T= \frac{1}{2} \int \frac{^id \vec{r}_p}{dt} \cdot \frac{^id \vec{r}_p}{dt} dm \tag{18} \]
이 된다. 여기서 BKE를 사용하여 위 식의 속도벡터를 전개하면 다음과 같이 된다.
\[ \begin{align} \frac{^i d\vec{r}_p}{dt} &= \frac{^id \vec{r}_A }{dt} + \frac{^i d \vec{\rho}}{dt} \tag{19} \\ \\ &= \vec{v}_A+ {^i \vec{\omega}^a} \times \vec{\rho} \end{align} \]
식 (19)를 (18)에 대입하면 운동에너지는 다음과 같이 된다.
\[ \begin{align} T &= \frac{1}{2} \int \vec{v}_A \cdot \vec{v}_A + 2 \vec{v}_A \cdot ( {^i\vec{\omega}^a} \times \vec{\rho} ) + {^i\vec{\omega}^a} \cdot \left( \vec{\rho} \times ( {^i\vec{\omega}^a} \times \vec{\rho}) \right) dm \tag{20} \\ \\ &= \frac{1}{2} m \vec{v}_A \cdot \vec{v}_A+ \vec{v}_A \cdot \left( {^i\vec{\omega}^a} \times \int \vec{\rho} dm \right) + \frac{1}{2} {^i\vec{\omega}^a} \cdot \left( \int \vec{\rho} \times ( {^i\vec{\omega}^a} \times \vec{\rho} ) dm \right) \\ \\ &= \frac{1}{2} m \vec{v}_A \cdot \vec{v}_A+ \vec{v}_A \cdot ( {^i\vec{\omega}^a} \times m \vec{r}_{G/A} ) + \frac{1}{2} {^i\vec{\omega}^a} \cdot \left( \int \vec{\rho} \times ( {^i\vec{\omega}^a} \times \vec{\rho} ) dm \right) \end{align} \]
식 (10)과 (12)에 의하면 식 (20)은 다음과 같이 된다.
\[ \begin{align} T &= \frac{1}{2} m \vec{v}_A \cdot \vec{v}_A+ \vec{v}_A \cdot ( {^i\vec{\omega}^a} \times m \vec{r}_{G/A} ) + \frac{1}{2} {^i\vec{\omega}^a} \cdot \vec{H}_{A/A} \tag{21} \\ \\ & = \frac{1}{2} m \vec{v}_A \cdot \vec{v}_A+ \vec{v}_A \cdot ( {^i\vec{\omega}^a} \times m \vec{r}_{G/A} ) + \frac{1}{2} {^i\vec{\omega}^a} \cdot ( \bar{I}_A \cdot {^i\vec{\omega}^a} ) \end{align} \]
지금까지 임의의 점 A를 기준으로 강체의 운동방정식을 유도하였다. 정리하면 다음과 같다.
\[ \begin{align} & \vec{F}= m \left( \vec{a}_A+ \frac{^a d {^i\vec{\omega}^a}}{dt} \times \vec{r}_{G/A} + {^i\vec{\omega}^a} \times ({^i\vec{\omega}^a} \times \vec{r}_{G/A} ) \right) \tag{22} \\ \\ & \vec{M}_A = \vec{r}_{G/A} \times m \vec{a}_A+ \bar{I}_A \cdot \frac{^a d {^i \vec{\omega}^a}}{dt}+ {^i\vec{\omega}^a} \times ( \bar{I}_A \cdot {^i\vec{\omega}^a} ) \\ \\ & T = \frac{1}{2} m \vec{v}_A \cdot \vec{v}_A+ \vec{v}_A \cdot ( {^i\vec{\omega}^a} \times m \vec{r}_{G/A} ) + \frac{1}{2} {^i\vec{\omega}^a} \cdot ( \bar{I}_A \cdot {^i\vec{\omega}^a} ) \end{align} \]
이와 같이 임의의 점 \(A\) 에 대해서 유도한 강체의 운동방정식이 질량중심을 기준으로 유도한 강체의 운동방정식보다 훨씬 복잡하다. 또한 회전 운동방정식과 병진 운동방정식이 서로 연결(coupling) 되어 있다.
'항공우주 > 동역학' 카테고리의 다른 글
| 오일러의 회전 정리 (Euler’s Rotation Theorem) (0) | 2022.03.22 |
|---|---|
| 라그랑지 방정식을 이용한 강체 운동방정식 유도 (0) | 2022.02.14 |
| 강체의 운동방정식 - 3 (0) | 2022.02.06 |
| 강체의 운동방정식 - 2 (0) | 2022.02.05 |
| 강체의 운동방정식 - 1 (0) | 2022.02.03 |




댓글