지구는 자전의 영향으로 약간 타원형이다. 그래서 위도와 경도를 계산하기가 복잡하고, 지면과 수직인 방향이 지구의 중심을 향하지 않기 때문에 수식 전개가 어려워진다. 하지만 지구가 타원형이 아니고 원형이라고 가정하면 이러한 문제가 해결된다.
지구는 이심율이 매우 작은 거의 원형에 가까운 타원형이기 때문에 원형 지구 가정은 지구 재진입 비행체나 중/장거리 미사일의 운동 방정식을 세울 때 많이 사용된다.
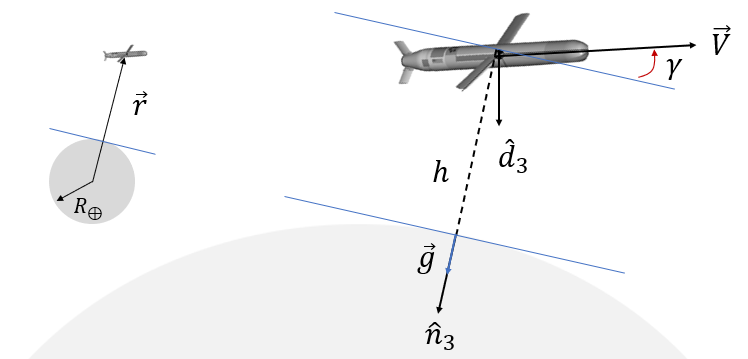
원형 지구 가정에 의해서 다음 식이 성립한다.
\[ \begin{align} & \vec{r}=-r \ \hat{n}_3 \tag{1} \\ \\ & r=R_{mean}+h \\ \\ & \vec{g}=g \ \hat{n}_3 \end{align} \]
여기서 \(R_{mean}\) 은 지구 평균 반지름이고 \(h\) 는 지면에서의 고도, \(\{n\}\) 은 이동 NED 좌표계(moving local tangent frame)이다.
ECEF 좌표계에서 미사일의 운동 방정식을 다음과 같이 구한 바 있다(일반적으로 미사일 운동을 위한 좌표계는 \(\{i\} \to \{e\} \to \{n\} \to \{d\} \to \{m\} \to \{b\}\) 순으로 전개된다).
\[ \frac{^ed \vec{V}}{dt}= \frac{\vec{L}}{m}+ \frac{\vec{D}}{m}+\vec{g}+\frac{\vec{T}}{m}- 2 ^i\vec{\omega}^e \times \vec{V} - ^i \vec{\omega}^e \times \left( ^i \vec{\omega}^e \times \vec{r} \right) \tag{2} \]
먼저 속도벡터를 좌표계 \(\{d\}\) 에서 미분해 보자. 식 (2)와 BKE를 이용하면 다음 관계식이 성립한다.
\[ \begin{align} \frac{^d d \vec{V}}{dt} &= \frac{^e d \vec{V}}{dt} + ^d \vec{\omega}^e \times \vec{V} \tag{3} \\ \\ &= \frac{\vec{L}}{m}+ \frac{\vec{D}}{m}+\vec{g}+\frac{\vec{T}}{m} \\ \\ & \ \ \ \ \ - 2 ^i\vec{\omega}^e \times \vec{V} - ^i \vec{\omega}^e \times \left( ^i \vec{\omega}^e \times \vec{r} \right) + ^d \vec{\omega}^e \times \vec{V} \end{align} \]
방향코사인행렬, 오일러각, 그리고 쿼터니언 | 박성수 | 딥웨이브- 교보ebook
이 책에서는 방향코사인행렬, 오일러각, 쿼터니언과 이들의 시간 변화율에 대해서 공부합니다. 모두 3차원 공간 상에서 어떤 기준 좌표계에 대해서 운동하는 강체의 상대적인 자세의 변화를 표
ebook-product.kyobobook.co.kr
식 (3)을 좌표계 \(\{d\}\) 로 표현하면 다음과 같다.
\[ \begin{align} \dot{V}^d &= - \left(2[\omega_{ie}^d \times ]+ [\omega_{ed}^d \times] \right) V^d + \frac{C_m^d L^m}{m}+ \frac{D^d}{m} \tag{4} \\ \\ & \ \ \ \ + C_n^d g^n +\frac{C_b^d T^b}{m}-[\omega_{ie}^d \times]^2 r^d \end{align} \]
여기서 \(^d \vec{\omega}^e =- ^e \vec{\omega}^d\) 임을 이용하였다. \(^e \vec{\omega}^d\) 는 연쇄법칙을 이용하면 다음과 같이 쓸 수 있다.
\[ ^e \vec{\omega}^d = \ ^e \vec{\omega}^n + \ ^n \vec{\omega}^d \tag{5} \]
먼저 \(^e \vec{\omega}^n\) 을 좌표계 \(\{n\}\) 으로 표현하면 다음과 같다.
\[ \begin{align} \omega_{en}^n &= C^T (y, \ -\frac{\pi}{2}- \lambda_{lat}) \left( \begin{bmatrix} 0 \\ - \dot{\lambda}_{lat} \\ 0 \end{bmatrix} + C^T (z, \lambda_{lon} ) \begin{bmatrix} 0 \\ 0 \\ \dot{\lambda}_{lon} \end{bmatrix} \right) \tag{6} \\ \\ &= \begin{bmatrix} \dot{\lambda}_{lon} \cos \lambda_{lat} \\ -\dot{\lambda}_{lat} \\ -\dot{\lambda}_{lon} \sin \lambda_{lat} \end{bmatrix} \end{align} \]
여기서 \( \lambda_{lon}\) 는 경도, \(\lambda_{lat}\) 는 위도다.
\(^n \vec{\omega}^d\) 를 좌표계 \(\{d\}\) 로 표현하면 다음과 같다.
\[ \omega_{nd}^d = C_n^d \begin{bmatrix} 0 \\ 0 \\ \dot{\psi} \end{bmatrix} + \begin{bmatrix} 0 \\ \dot{\gamma} \\ 0 \end{bmatrix} = \begin{bmatrix} - \dot{\psi} \sin \gamma \\ \dot{\gamma} \\ \dot{\psi} \cos \gamma \end{bmatrix} \tag{7} \]
따라서 \(\omega_{ed}^d\) 는 식 (6)과 (7)을 이용하면 다음과 같이 구할 수 있다.
\[ \begin{align} \omega_{ed}^d &= C_n^d \omega_{en}^n+ \omega_{nd}^d \tag{8} \\ \\ &= \begin{bmatrix} \dot{\lambda}_{lon} \cos \lambda_{lat} \cos \psi \cos \gamma - \dot{\lambda}_{lat} \sin \psi \cos \gamma + \dot{\lambda}_{lon} \sin \lambda_{lat} \sin \gamma - \dot{\psi} \sin \gamma \\ - \dot{\lambda}_{lon} \cos \lambda_{lat} \sin \psi - \dot{\lambda}_{lat} \cos \psi + \dot{\gamma} \\ \dot{\lambda}_{lon} \cos \lambda_{lat} \cos \psi \sin \gamma - \dot{\lambda}_{lat} \sin \psi \sin \gamma - \dot{\lambda}_{lon} \sin \lambda_{lat} \cos \gamma + \dot{\psi} \cos \gamma \end{bmatrix} \end{align} \]
\(\omega_{ie}^d\) 는 다음과 같이 계산할 수 있다.
\[ \begin{align} \omega_{ie}^d &= C_e^d \omega_{ie}^e \tag{9} \\ \\ &= \begin{bmatrix} \omega_{ie} \cos \lambda_{lat} \cos \psi \cos \gamma + \omega_{ie} \sin \lambda_{lat} \sin \gamma \\ - \omega_{ie} \cos \lambda_{lat} \sin \psi \\ \omega_{ie} \cos \lambda_{lat} \cos \psi \sin \gamma - \omega_{ie} \sin \lambda_{lat} \cos \gamma \end{bmatrix} \end{align} \]
\(r^d\) 는 다음과 같이 계산할 수 있다.
\[ r^d=C_n^d r^n= \begin{bmatrix} r \sin \gamma \\ 0 \\ -r \cos \gamma \end{bmatrix} \tag{10} \]
\( [ \omega_{ie}^d \times ]^2 r^d\) 는 다음과 같이 계산된다.
\[ [ \omega_{ie}^d \times]^2 r^d = \begin{bmatrix} r \omega_{ie}^2 \left( \cos \lambda_{lat} \sin \lambda_{lat} \cos \psi \cos \gamma - \cos^2 \lambda_{lat} \sin \gamma \right) \\ r \omega_{ie}^2 \cos \lambda_{lat} \sin \lambda_{lat} \sin \psi \\ r \omega_{ie}^2 \left( \cos \lambda_{lat} \sin \lambda_{lat} \cos \psi \sin \gamma + \cos^2 \lambda_{lat} \cos \gamma \right) \end{bmatrix} \tag{11} \]
\( [\omega_{ie}^d \times ] V^d\) 는 다음과 같이 계산된다.
\[ [ \omega_{ie}^d \times ] V^d = \begin{bmatrix} 0 \\ V \omega_{ie} \cos \lambda_{lat} \cos \psi \sin \gamma - V \omega_{ie} \sin \lambda_{lat} \cos \gamma \\ V \omega_{ie} \cos \lambda_{lat} \sin \psi \end{bmatrix} \tag{12} \]
\( [ \omega_{ed}^d \times ] V^d\) 는 다음과 같이 계산된다.
\[ [ \omega_{ed}^d \times] V^d = \begin{bmatrix} 0 \\ ( V \dot{\lambda}_{lon} \cos \lambda_{lat} \cos \psi \sin \gamma - V \dot{\lambda}_{lat} \sin \psi \sin \gamma \\ -V \dot{\lambda}_{lon} \sin \lambda_{lat} \cos \gamma + V \dot{\psi} \cos \gamma ) \\ V \dot{\lambda}_{lon} \cos \lambda_{lat} \sin \psi +V \dot{\lambda}_{lat} \cos \psi - V \dot{\gamma} \end{bmatrix} \tag{13} \]
\(C_m^d L^m\) 은 다음과 같이 계산된다.
\[ C_m^d L^m = \begin{bmatrix} 0 \\ L \sin \sigma \\ -L \cos \sigma \end{bmatrix} \tag{14} \]
\(C_n^d g^n\) 은 다음과 같이 계산된다.
\[ C_n^d g^n= \begin{bmatrix} -g \sin \gamma \\ 0 \\ g \cos \gamma \end{bmatrix} \tag{15} \]
\(C_b^d T^b\) 는 다음과 같이 계산된다.
\[ C_b^d T^b= \begin{bmatrix} T \cos \epsilon \\ T \sin \sigma \sin \epsilon \\ -T \cos \sigma \sin \epsilon \end{bmatrix} \tag{16} \]
종합하면 식 (4)의 벡터를 각 성분별로 정리하면 다음과 같다.
\[ \begin{align} & \dot{V} = - \frac{D}{m} + \frac{T \cos \epsilon}{m} -g \sin \gamma \tag{17} \\ \\ & \ \ \ \ \ \ \ \ \ \ {\color{red} +r \omega_{ie}^2 \cos \lambda_{lat} \left( \cos \lambda_{lat} \sin \gamma - \sin \lambda_{lat} \cos \psi \cos \gamma \right) } \\ \\ \\ & \dot{\psi} = \frac{(L+T \sin \epsilon ) \sin \sigma}{mV \cos \gamma} {\color{red} + \frac{V \tan \lambda_{lat} \sin \psi \cos \gamma}{r} } \\ \\ & \ \ \ \ \ \ \ \ \ \ {\color{red} -2 \omega_{ie} \left( \cos \lambda_{lat} \cos \psi \tan \gamma - \sin \lambda_{lat} \right) } \\ \\ & \ \ \ \ \ \ \ \ \ \ {\color{red} + \frac{ r \omega_{ie}^2 \cos \lambda_{lat} \sin \lambda_{lat} \sin \psi }{V \cos \gamma} } \\ \\ \\ & \dot{\gamma} = \frac{(L+T \sin \epsilon ) \cos \sigma }{mV} - \frac{g \cos \gamma}{V} \\ \\ & \ \ \ \ \ \ \ \ \ {\color{red} + \frac{V \cos \gamma}{r} + 2 \omega_{ie} \cos \lambda_{lat} \sin \psi } \\ \\ & \ \ \ \ \ \ \ \ \ {\color{red} + \frac{r \omega_{ie}^2}{V} \cos \lambda_{lat} \left( \sin \lambda_{lat} \cos \psi \sin \gamma + \cos \lambda_{lat} \cos \gamma \right) } \end{align} \]
빨간색 부분은 ‘평평한 지구 가정’에 의해 유도된 식에서 추가된 항이다.
한편, 미사일의 위치를 계산하기 위하여 속도 관계식을 살펴보자. 속도 \(\vec{V}\) 는 지면에서의 상대 속도이므로
\[ \vec{V} = \frac{^e d \vec{r}}{dt} = \frac{ ^n d \vec{r}}{dt}+ \ ^e \vec{\omega}^n \times \vec{r} \tag{18} \]
이다. 속도벡터를 좌표계 \(\{n\}\) 으로 표현하면 다음 식이 성립한다.
\[ V^n=C_d^n V^d= \dot{r}^n+ [ \omega_{en}^n \times ] r^n \tag{19} \]
식 (19)를 풀어 쓰면 다음과 같다.
\[ \begin{align} & \dot{\lambda}_{lat} = \frac{V \cos \psi \cos \gamma}{r} \tag{20} \\ \\ & \dot{\lambda}_{lon}= \frac{V \sin \psi \cos \gamma}{r \cos \lambda_{lat}} \\ \\ & \dot{r} = V \sin \gamma \end{align} \]
'항공우주 > 비행역학' 카테고리의 다른 글
| 제트기의 항속시간(Endurance)과 항속거리(Range) (0) | 2022.10.02 |
|---|---|
| NED 좌표계와 LLH 좌표계간의 속도 변환식 (0) | 2022.01.09 |
| 평평한 지구 가정에 의한 미사일 운동 방정식 유도 (0) | 2021.12.22 |
| ECEF 좌표계에서 미사일 운동 방정식 유도 (0) | 2021.12.21 |
| 미사일 좌표계의 정의 (0) | 2021.12.20 |




댓글