모든 좌표변환은 어떤 회전축과 그 회전축을 중심으로 하는 한번의 회전을 통해서 가능하다. 쿼터니언(quaternions)의 정의도 이 회전축과 회전각에 기반을 두고 있다.

단위벡터는 크기가 1인 벡터이기 때문에 방향을 표시하는데 자주 쓰인다. 여기서도 회전축 방향을 정하는데 단위벡터를 이용하기로 하고 기호로 \(\hat{p}\) 으로 표시한다. 회전벡터(rotation vector)는 회전축과 회전각을 간결하게 표현한 벡터로서 그 크기는 회전각이며 방향은 회전축과 같은 방향으로서 다음과 같이 정의한다.
\[ \begin{align} \vec{\beta} = \beta \hat{p} \tag{1} \end{align} \]
여기서 \(\beta\) 는 회전각, \(\vec{\beta}\) 는 회전벡터다.
좌표계 {a}를 기준으로 좌표계 {b}가 각속도 벡터 \(^a \vec{\omega}^b\) 로 회전 운동하면 두 좌표계의 상대적인 자세가 변할 것이다. 따라서 두 좌표계의 좌표변환을 나타내는 방향코사인행렬 (DCM), 오일러각, 그리고 쿼터니언도 시간에 따라 변화하게 된다. 마찬가지로 회전벡터 또한 시간에 따라 변화한다.
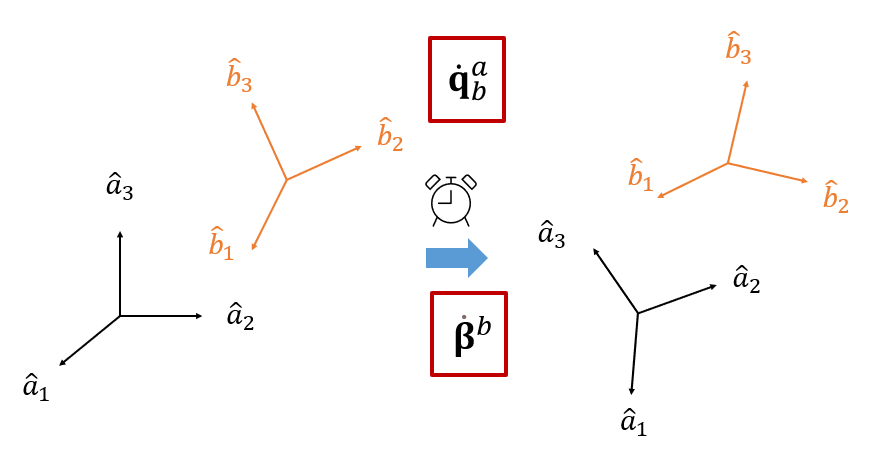
그렇다면 회전벡터의 시간 변화율 또는 회전벡터의 시간 미분과 각속도 벡터와의 관계는 어떻게 될까.
쿼터니언의 정의에 의하면 좌표계 {a}를 회전축 \(\hat{p}\) 축을 중심으로 \(\beta\) 만큼 회전시켜서 나온 좌표계를 {b}라고 할 때, 쿼터니언 \(\mathbf{q}_b^a\) 는 다음과 같다 (https://pasus.tistory.com/86).
\[ \begin{align} \mathbf{q}_b^a = \begin{bmatrix} \cos \left( \frac{\beta (t)}{2} \right) \\ \frac{\mathbf{\beta}^b (t)}{\beta (t)} \sin \left( \frac{ \beta (t)}{2} \right) \end{bmatrix} = \begin{bmatrix} q_0 \\ \mathbf{q}_{1:3} \end{bmatrix} \tag{2} \end{align} \]
여기서 \(\beta^b\) 는 회전벡터 \(\vec{\beta}\) 를 좌표계 {b}로 표현한 것이다. 회전각과 회전벡터에 시간 \(t\) 를 명시한 이유는 모두 시간에 따라 변화한다는 것을 강조하기 위한 것이다. 이제 위 식을 미분하면 다음과 같다.
\[ \begin{align} \dot{\mathbf{q}}_b^a = \begin{bmatrix} -\frac{ \dot{\beta}}{2} \sin \left( \frac{ \beta}{2} \right) \\ \frac{ \dot{\beta}^b }{\beta} \sin \left( \frac{\beta}{2} \right) - \frac{ \beta^b \dot{\beta}}{\beta^2} \sin \left( \frac{\beta}{2} \right)+ \frac{ \beta^b \dot{\beta}}{2 \beta} \cos \left( \frac{\beta}{2} \right) \end{bmatrix} \tag{3} \end{align} \]
반면에 쿼터니언의 시간 변화율은 다음 식으로 주어진다.
\[ \begin{align} \dot{\mathbf{q}}_b^a &= \frac{1}{2} \mathbf{q}_b^a \otimes \bar{\omega}_{ab}^b \tag{4} \\ \\ &= \frac{1}{2} \begin{bmatrix} q_0 & -(\mathbf{q}_{1:3} )^T \\ \mathbf{q}_{1:3} & q_0 I+[ \mathbf{q}_{1:3} \times ] \end{bmatrix} \begin{bmatrix} 0 \\ \omega_{ab}^b \end{bmatrix} \\ \\ &= \frac{1}{2} \begin{bmatrix} -(\mathbf{q}_{1:3} )^T \omega_{ab}^b \\ q_0 \omega_{ab}^b+[\mathbf{q}_{1:3} \times] \omega_{ab}^b \end{bmatrix} \end{align} \]
여기서 \(\omega_{ab}^b\) 는 각속도 벡터 \(^a \vec{\omega}^b\) 를 좌표계 {b}로 표현한 것이다. 식 (2)를 이용하면, 위 식은 다음과 같이 된다.
\[ \begin{align} \dot{\mathbf{q}}_b^a = \begin{bmatrix} -\frac{1}{2\beta} \sin \left( \frac{\beta}{2} \right) (\beta^b )^T \omega_{ab}^b \\ \frac{1}{2} \cos \left( \frac{\beta}{2} \right) \omega_{ab}^b + \frac{1}{2\beta} \sin \left( \frac{\beta}{2} \right) [\beta^b \times ] \omega_{ab}^b \end{bmatrix} \tag{5} \end{align} \]
이제 식 (5)와 (3)을 비교하면 다음과 같다.
\[ \begin{align} & \frac{ \dot{\beta}}{2} \sin \left( \frac{ \beta}{2} \right) = \frac{1}{2\beta} \sin \left( \frac{\beta}{2} \right) (\beta^b )^T \omega_{ab}^b \tag{6} \\ \\ & \frac{ \dot{\beta}^b }{\beta} \sin \left( \frac{\beta}{2} \right) - \frac{ \beta^b \dot{\beta}}{\beta^2} \sin \left( \frac{\beta}{2} \right)+ \frac{ \beta^b \dot{\beta}}{2 \beta} \cos \left( \frac{\beta}{2} \right) \\ \\ & \ \ \ \ \ \ \ \ = \frac{1}{2} \cos \left( \frac{\beta}{2} \right) \omega_{ab}^b + \frac{1}{2\beta} \sin \left( \frac{\beta}{2} \right) [\beta^b \times ] \omega_{ab}^b \end{align} \]
위 식의 첫번째 식에 의하면 \(\dot{\beta}\) 은 다음과 같이 계산된다.
\[ \begin{align} \dot{\beta}= \frac{1}{\beta} (\beta^b )^T \omega_{ab}^b \tag{7} \end{align} \]
또한, 두번째 식에 의하면 \(\dot{\beta}^b \) 를 다음과 같이 계산할 수 있다.
\[ \begin{align} \dot{\beta}^b= \frac{ \beta^b \dot{\beta}}{ \beta} - \frac{\beta^b \dot{\beta}}{2} \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) }+ \frac{\beta}{2} \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } \omega_{ab}^b+ \frac{1}{2} [\beta^b \times ] \omega_{ab}^b \tag{8} \end{align} \]
위 식에 식 (7)을 대입하고 다음 관계식을 이용하면,
\[ \begin{align} (\vec{a} \cdot \vec{c}) \vec{b}= \vec{a} \times (\vec{b} \times \vec{c})+(\vec{a} \cdot \vec{b}) \vec{c} \tag{9} \end{align} \]
\(\dot{\beta}^b \) 는 다음과 같이 된다.
\[ \begin{align} \dot{\beta}^b &= \frac{\beta^b}{\beta^2} (\beta^b )^T \omega_{ab}^b - \frac{\beta^b}{2\beta} (\beta^b )^T \omega_{ab}^b \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } \tag{10} \\ \\ & \ \ \ \ \ + \frac{\beta}{2} \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } \omega_{ab}^b + \frac{1}{2} [\beta^b ×] \omega_{ab}^b \\ \\ &= \frac{1}{\beta^2} \left( [\beta^b \times ][\beta^b \times ] \omega_{ab}^b +(\beta^b )^T \beta^b \omega_{ab}^b \right) \\ \\ & \ \ \ \ \ -\frac{1}{2\beta} \left( [\beta^b \times ][\beta^b \times ] \omega_{ab}^b +(\beta^b )^T \beta^b \omega_{ab}^b \right) \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) }\\ \\ & \ \ \ \ \ + \frac{\beta}{2} \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) }\omega_{ab}^b + \frac{1}{2} [\beta^b \times ] \omega_{ab}^b \\ \\ &= \omega_{ab}^b + \frac{1}{\beta^2} ([\beta^b \times ][\beta^b \times ] \omega_{ab}^b ) \\ \\ & \ \ \ \ \ - \frac{\beta}{2} \omega_{ab}^b \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } - \frac{1}{2\beta} ([\beta^b \times ][\beta^b \times ]\omega_{ab}^b ) \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } \\ \\ & \ \ \ \ \ + \frac{\beta}{2} \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } \omega_{ab}^b + \frac{1}{2} [\beta^b \times ] \omega_{ab}^b \\ \\ &= \omega_{ab}^b + \frac{1}{\beta^2} ([\beta^b \times ]^2 \omega_{ab}^b )- \frac{1}{2 \beta} ([\beta^b \times ]^2 \omega_{ab}^b ) \frac{ \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } + \frac{1}{2} [\beta^b \times ] \omega_{ab}^b \\ \\ &= \omega_{ab}^b + \frac{1}{\beta^2} \left( 1- \frac{ \beta \cos \left( \frac{\beta}{2} \right) }{ \sin \left( \frac{\beta}{2} \right) } \right) [\beta^b \times ]^2 \omega_{ab}^b + \frac{1}{2} [\beta^b \times ] \omega_{ab}^b \\ \\ &=\omega_{ab}^b + \frac{1}{\beta^2} \left( 1- \frac{\beta \sin \beta }{2(1-\cos \beta )} \right) [\beta^b \times ]^2 \omega_{ab}^b + \frac{1}{2} [\beta^b \times ] \omega_{ab}^b \end{align} \]
결론적으로 회전벡터의 시간 변화율은 다음과 같다.
\[ \begin{align} \dot{\beta}^b =\omega_{ab}^b + \frac{1}{2} [\beta^b \times ] \omega_{ab}^b + \frac{1}{\beta^2} \left( 1- \frac{\beta \sin \beta }{2(1-\cos \beta )} \right) [\beta^b \times ]^2 \omega_{ab}^b \tag{11} \end{align} \]
위 식을 벡터 미분 형태로 표현하면 다음과 같다.
\[ \begin{align} \frac{^b d\vec{\beta}}{dt} = {^a \vec{\omega}^b} + \frac{1}{2} \vec{\beta} \times {^a \vec{\omega}^b} + \frac{1}{\beta^2} \left( 1- \frac{\beta \sin \beta }{2(1-\cos \beta )} \right) \vec{\beta} \times ( \vec{\beta} \times {^a \vec{\omega}^b} ) \tag{12} \end{align} \]
'항공우주 > 동역학' 카테고리의 다른 글
| 수정 로드리게스 파라미터 (MRP) (0) | 2025.06.03 |
|---|---|
| 로드리게스 파라미터 (0) | 2025.06.01 |
| 오일러 운동방정식 (Euler’s Equation of Motion) (0) | 2024.03.22 |
| 관성 주축 (Principal Axes of Inertia) (0) | 2023.02.19 |
| 좌표변환과 관성행렬 (Inertia Matrix) (0) | 2023.02.17 |




댓글