우주비행체가 목표로 한 도착지 행성의 중력권으로 접근하는 단계에서의 궤도 설계는 행성의 궤도에 진입할지 또는 플라이바이(fly-by) 기동을 할지 등, 임무 목적에 따라 달라지며 이와 관련하여 설정된 조건의 충족을 목표로 삼아 수행된다.
예를 들어 행성의 궤도에 진입하는 것을 목적으로 할 경우 특정 시간에 특정 고도, 특정 경사각을 가진 궤도의 지점으로 도착해야 한다는 목표를 설정할 수 있을 것이다. 이러한 목표를 도착 타겟팅이라고 한다. 도착 타겟팅은 도착지 행성을 기준으로 진입 점근선(incoming asymptote)을 원하는 위치와 방향으로 배치하는 것으로써 달성될 수 있는데 이 때 사용되는 유용한 방법이 B-평면 타켓팅(B-plane targeting)이다.
B-평면은 점근선의 위치와 방향을 단순하게 '평면의 조준점'으로 표현할 수 있을 뿐 아니라 섭동력이 궤적에 미치는 영향과 궤적 추정의 불확실성 등을 쉽게 매핑할 수 있다. 또한 조준점과 우주비행체의 속도벡터와의 관계식을 이용하면 속도벡터의 조정으로 수행되는 궤적수정기동(TCM, trajectory correction manuever) 설계에도 쉽게 적용할 수 있다.
B-평면은 아래 그림과 같이 목표로 하는 도착지 행성의 중심을 원점으로 하고 진입 점근선과 수직인 평면으로 정의한다. 그림에서 \(\hat{S}\) 는 점근선벡터(asymptote vector)로서 진입 점근선의 방향을 나타내는 단위벡터다. 이 벡터는 점근선과 평행하므로 우주비행체의 쌍곡선 초과속도(hyperbolic excess velocity) 벡터인 \(\vec{v}_\infty\) 와도 평행하다. 두 벡터 \(\hat{S}\) 와 \(\vec{v}_\infty\) 는 궤도면(orbital plane) 상에 존재한다.
\(\vec{B}\) 는 B-벡터 또는 충격벡터(impact vector)로서 목표 행성의 중심으로부터 진입 점근선까지의 최단거리 벡터이며 진입 점근선과 직교한다. 따라서 \(\hat{S}\) 와 직각인 \(\vec{B}\) 는 궤도면과 B-평면에 동시에 존재한다.
B-벡터의 끝점, 쯕 B-벡터와 진입 점근선이 만나는 점을 조준점(aim point)라고 한다. 이 점은 도착지 행성의 중력이 우주비행체의 궤적에 영향을 미치지 않는 경우 우주비행체가 B-평면을 관통하는 지점을 가리킨다.
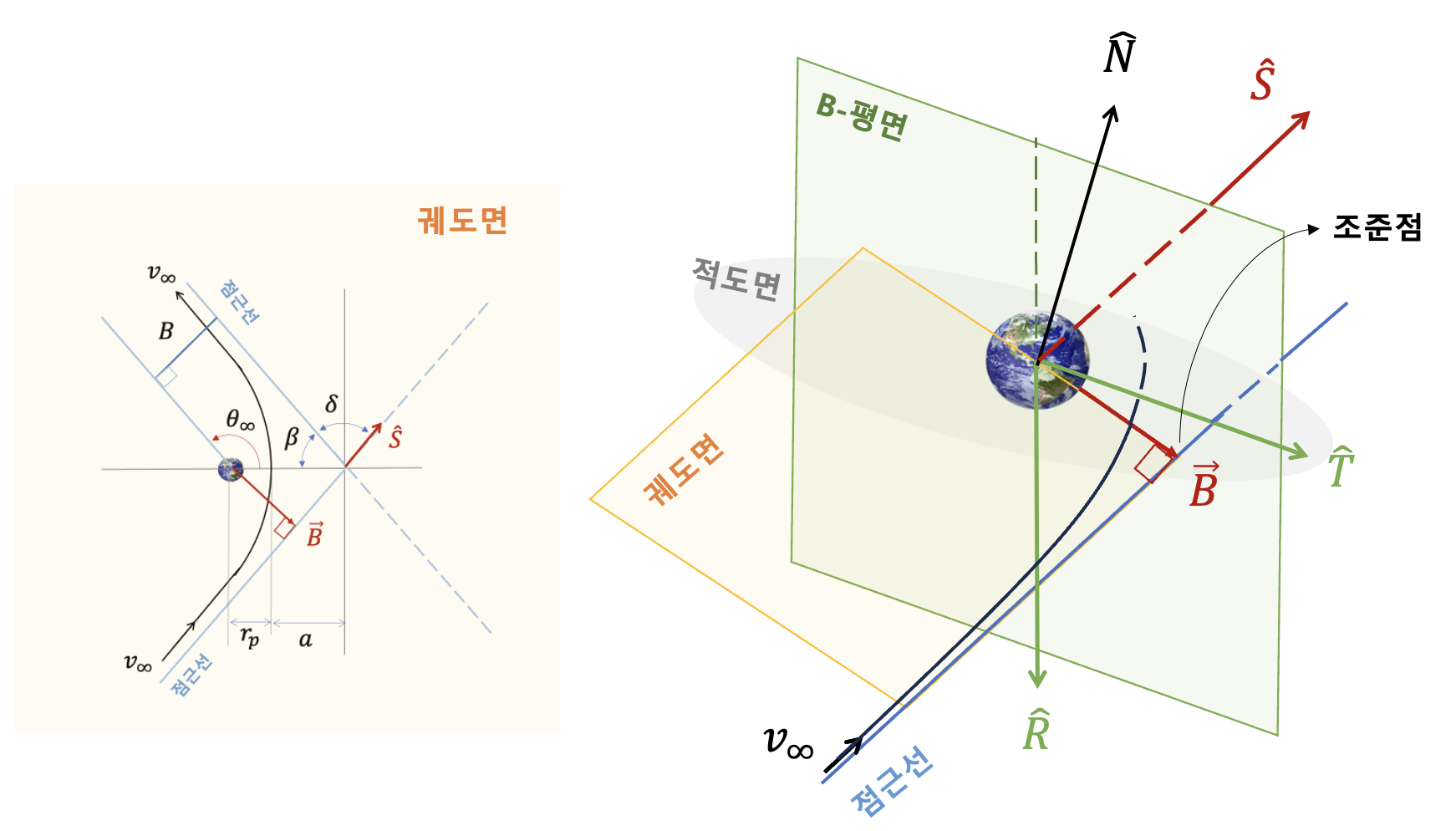
B-벡터를 표현하기 위해서 B-평면 상에 두개의 좌표축인 단위벡터 \(\hat{T}\) 와 \(\hat{R}\) 을 다음과 같이 정의한다.
\[ \begin{align} \hat{T}= \frac{\hat{S} \times \hat{N}}{\vert \hat{S} \times \hat{N} \vert} , \ \ \ \ \ \hat{R}= \hat{S} \times \hat{T} \tag{1} \end{align} \]
여기서 \(\hat{N}\) 은 \(\hat{S}\) 와 평행하지 않은 단위벡터는 모두 가능하나 일반적으로 행성중심관성좌표계의 \(z\)축과 일치하도록 목표 행성의 적도면과 수직인 벡터로 정한다.
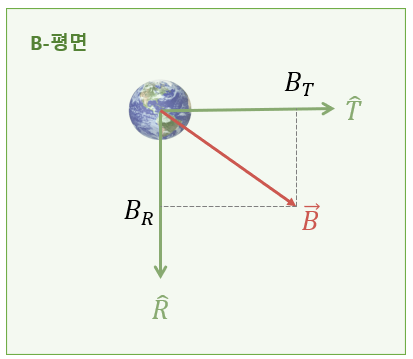
B-벡터를 \(\hat{T}\) 축과 \(\hat{R}\) 축으로 표현하면 다음과 같다.
\[ \begin{align} \vec{B} &= B_T \hat{T}+B_R \hat{R} \tag{2} \\ \\ &= (\vec{B} \cdot \hat{T}) \ \hat{T}+( \vec{B} \cdot \hat{R} ) \ \hat{R} \end{align} \]
쌍곡선 궤도의 기하학에 관한 게시글(https://pasus.tistory.com/359)의하면 B-벡터의 크기, 즉 충격파라미터(impact parameter)는 \(B= \frac{h}{v_\infty}\) 이므로 B-벡터는 다음과 같은 관계식을 갖는다.
\[ \begin{align} \vec{B}= \frac{ \hat{S} \times \vec{h}}{v_\infty} \tag{3} \end{align} \]
식 (3)을 식 (2)에 대입하면 다음과 같이 B-벡터의 \(\hat{T}\) 와 \(\hat{R}\) 축 성분을 계산할 수 있다.
\[ \begin{align} B_T &= \frac{1}{v_\infty} (\hat{S} \times \vec{h} ) \cdot \hat{T} = \frac{1}{v_\infty} (\hat{T} \times \hat{S} ) \cdot \vec{h}=-\frac{\hat{R} \cdot \vec{h}}{v_\infty} \tag{4} \\ \\ B_R &= \frac{1}{v_\infty} (\hat{S} \times \vec{h} ) \cdot \hat{R} = \frac{1}{v_\infty} (\hat{R} \times \hat{S} ) \cdot \vec{h}=\frac{\hat{T} \cdot \vec{h}}{v_\infty} \end{align} \]
점근선벡터 \(\hat{S}\) 는 아래 그림과 같은 기하학적인 관계식을 이용하여 궤도중심좌표계(perifocal frame)로 표현할 수 있다.
\[ \begin{align} \hat{S}= \cos \beta \ \hat{p}_1+ \sin \beta \ \hat{p}_2 \tag{5} \end{align} \]
여기서 \(\beta\) 는 점근선 각도로서 다음과 같이 계산된다.
\[ \begin{align} \beta =\cos^{-1} \left( \frac{1}{e} \right) \tag{6} \end{align} \]
따라서
\[ \begin{align} & \cos \beta = \frac{1}{e} \tag{7} \\ \\ & \sin \beta = \sqrt{1-\cos^2 \beta}= \sqrt{ \frac{e^2-1}{e^2} } \end{align} \]
이 된다.

정의에 의하면 궤도중심좌표계의 \(\hat{p}_1\) 축은 이심율 벡터 \(\vec{e}\) 와 평행하고 \(\hat{p}_3\) 축은 각운동량 벡터 \(\vec{h}\) 와 평행하다. 이를 이용하면 \(\hat{p}_1\) 축과 \(\hat{p}_2\) 축을 이심율 벡터와 각운동량 벡터의 함수로 표현할 수 있다.
\[ \begin{align} \hat{p}_1 &= \frac{\vec{e}}{e} \tag{8} \\ \\ \hat{p}_2 &= \hat{p}_3 \times \hat{p}_1= \frac{ \vec{h} \times \vec{e} }{he} \end{align} \]
식 (7)과 (8)을 식 (5)에 대입하면 점근선벡터를 다음과 같이 이심율 벡터와 각운동량 벡터만의 함수로 표현할 수 있다.
\[ \begin{align} \hat{S}= \frac{\vec{e}}{e^2} + \frac{ \sqrt{e^2-1}}{e^2} \ \frac{ \vec{h} \times \vec{e}}{h} \tag{9} \end{align} \]
여기서 운동량 벡터와 이심율 벡터는 다음과 같이 우주비행체의 위치벡터와 속도벡터만으로 계산할 수 있으며 궤도의 어느 위치에서 계산하더라도 일정한 값을 갖는다 (https://pasus.tistory.com/287).
\[ \begin{align} \vec{h} &= \vec{r} \times \vec{v} \tag{10} \\ \\ \vec{e} &= \frac{1}{\mu} \left(\vec{v} \times \vec{h}- \mu \frac{\vec{r}}{r} \right) \\ \\ &= \frac{1}{\mu} \left( \left( v^2- \frac{\mu}{r} \right) \vec{r}-(\vec{r} \cdot \vec{v} ) \vec{v} \right) \end{align} \]
식 (1)에 의하면 \(\hat{N}\) 는 우주비행체의 위치나 속도에 관계없이 목표 행성의 관성좌표계로 정해지기 때문에 \(\hat{T}\) 축과 \(\hat{R}\) 축은 \(\hat{S}\) 만의 함수가 된다. 또한 식 (3)에 의하면 B-벡터도 \(\hat{S}, \ \vec{h}, \ v_\infty \) 로 정해지고 식 (9)와 (10)에 의하면 \(\hat{S}, \ \vec{h}\) 도 우주비행체의 위치벡터와 속도벡터만으로 계산할 수 있으므로 B-벡터와 B-평면 모두 우주비행체의 위치벡터와 속도벡터 및 \(v_\infty\) 만의 함수로 나타낼 수 있다.
한편 쌍곡선 궤도의 기하학에 관한 게시글(https://pasus.tistory.com/359)의하면 근지점까지의 거리는 다음식으로부터 계산할 수 있다.
\[ \begin{align} B=r_p \sqrt{ 1+ \frac{2\mu}{v_\infty^2 r_p } } \tag{11} \end{align} \]
양변을 제곱하고 근의 공식을 이용하면 \(r_p\) 는 다음과 같이 계산된다.
\[ \begin{align} r_p= - \frac{\mu}{v_\infty^2 } + \sqrt{ \frac{\mu^2}{v_\infty^4 }+B^2 } \tag{12} \end{align} \]
또한 케플러 방정식에 의하면 쌍곡선 궤도의 근지점에서 임의의 위치까지의 비행시간은 다음 식으로 나타낼 수 있다 (https://pasus.tistory.com/309).
\[ \begin{align} t &= \frac{h^3}{\mu^2} \ \frac{ e \sinh F-F }{(e^2-1)^{3/2} } \tag{13} \\ \\ &= \sqrt{ \frac{(-a)^3}{\mu} } \ (e \sinh F-F) \end{align} \]
여기서 \(a\) 는 쌍곡선 궤도의 장반경으로 \(a \lt 0\) 이며 \(F\) 는 쌍곡선궤도의 이심 비행각(hyperbolic eccentric anomaly)이다.

식 (13)은 근지점부터 측정하기 시작한 비행시간이다. B-평면 문제에서는 외부로부터 목표 행성에 접근하기 때문에 임의의 위치에서부터 근지점까지 도달하는데 걸리는 시간으로 다시 작성해야 한다. 이 시간을 최근접 도달 시간(TCA, time to closest approach)이라고 한다. 그러면 식 (13)에서 실제 비행각과 이에 해당하는 이심 비행각이 모두 음수에 해당하므로 식 (13)을 다음과 같이 변경한다.
\[ \begin{align} t_{TCA} = \sqrt{ \frac{(-a)^3}{\mu} } \ (F - e \sinh F) \tag{14} \end{align} \]
여기서 이심 비행각과 실제 비헹각은 다음과 같은 관계식을 갖는다.
\[ \begin{align} \tanh \frac{F}{2}= \sqrt{\frac{e-1}{e+1} } \tan \frac{\theta}{2} \tag{15} \end{align} \]

결론적으로 목표 행성을 기준으로 우주비행체의 현재 위치와 속도벡터 \(\vec{r}\) 와 \(\vec{v}\)가 주어지면 지금까지 유도한 여러 방정식을 통해 B-평면과 조준점의 위치, 또는 B-벡터, 최근접 도달 시간 등을 계산할 수 있다.
'항공우주 > 우주역학' 카테고리의 다른 글
| [B-Plane] B-평면 타켓팅 - 1 (0) | 2025.01.30 |
|---|---|
| [B-Plane] 좌표변환 (0) | 2025.01.04 |
| 쌍곡선 궤도의 기하학 (0) | 2024.12.27 |
| 대기 항력에 의한 궤도요소의 시간 변화율 (0) | 2024.10.29 |
| J2 섭동에 의한 궤도요소의 시간 변화율 - 2 (0) | 2024.09.24 |




댓글