램버트(Lambert)는 궤도 운동을 하는 물체에 대한 두 지점 사이의 비행시간(time of flight)은 두 지점까지의 거리의 합, 두 지점을 직선으로 연결한 코드(chord) 길이, 궤도의 장반경만의 함수가 아닐까 생각했다. 나중에 라그랑지에 의해서 증명된 이 내용을 램버트 정리(Lambert's theorem)라고 한다.
램버트 정리는 케플러 방정식에서 도출할 수 있으며, 둘은 비슷한 문제를 푸는 관계라고 볼 수 있다. 케플러 방정식의 경우와 마찬가지로 램버트의 정리도 타원, 포물선, 쌍곡선의 세 가지 경우로 나뉜 램버트 방정식으로 표현되는데 수학적인 형식은 다음과 같다.
\[ t_2-t_1=f(r_1+r_2, c, a) \tag{1} \]
여기서 \(r_1, r_2\) 는 궤도의 촛점(지구 중심)에서 두 지점까지의 거리, \(c\) 는 코드 길이, \(a\) 는 장반경이다.
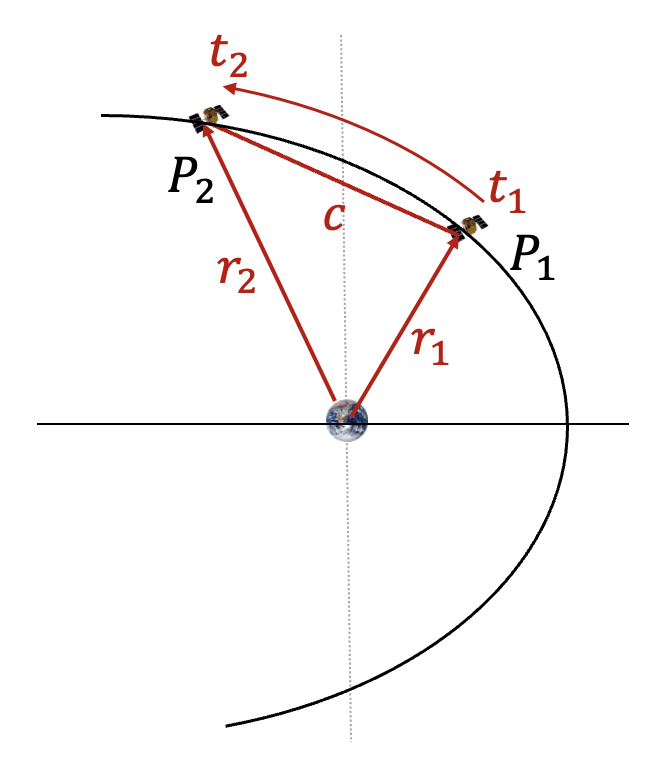
먼저 타원궤도에서 램버트 방정식을 유도해 보겠다.

그림에서 \(x\) 축과 \(y\) 축은 타원의 중심 \(O\) 를 원점으로 하는 좌표축이다. 그러면 타원궤도를 돌고 있는 물체의 두 지점 \(P_1\) 과 \(P_2\) 의 위치는 다음과 같이 \(x\) 축과 \(y\) 축으로 표현할 수 있다.
\[ \begin{align} & x_1=a \cos E_1, \ \ \ \ \ x_2=a \cos E_2 \tag{2} \\ \\ & y_1=b \sin E_1, \ \ \ \ \ y_2=b \sin E_2 \end{align} \]
여기서 \(b\) 는 단반경(semi-minor axis)의 길이로서 이심율이 \(e\) 인 경우 \(b=a \sqrt{1-e^2 }\) 으로 주어진다. 식 (2)를 이용하면 코드 길이 \(c\) 는 다음과 같이 계산할 수 있다.
\[ \begin{align} c^2 &=(x_1-x_2 )^2+(y_1-y_2 )^2 \tag{3} \\ \\ &=a^2 (\cos E_1 -\cos E_2 )^2+ a^2 (1-e^2) (\sin E_1 - \sin E_2 )^2 \end{align} \]
한편 두 지점 \(P_1\) 과 \(P_2\) 의 거리는 기하학적인 관계식을 이용하여 다음과 같이 계산할 수 있다.
\[ \begin{align} & r_1=a-ae \cos E_1 \tag{4} \\ \\ & r_2=a-ae \cos E_2 \end{align} \]
따라서 두 거리의 합은 다음과 같다.
\[ \begin{align} r_1+r_2 =2a \left[ 1- \frac{1}{2} e ( \cos E_1 + \cos E_2 ) \right] \tag{5} \end{align} \]
타원궤도의 케플러 방정식(https://pasus.tistory.com/308)에 의하면 두 지점까지의 비행시간은 다음과 같이 주어진다.
\[ \begin{align} t_2-t_1 &= \sqrt{ \frac{a^3}{\mu} } (E_2-e \sin E_2 -E_1+e \sin E_1 ) \tag{6} \\ \\ & = \sqrt{ \frac{a^3}{\mu} } \left[ E_2-E_1-e ( \sin E_2 - \sin E_1 ) \right] \end{align} \]
식 (3), (5), (6)에 의하면 공통적으로 \(a, e. E_1, E_2\) 의 함수이기 때문에 식 (1)의 형태로 종합할 수 있지 않을까 하는 생각이 들 것이다. 삼각함수의 덧셈이 등장하므로 일단 필요한 삼각함수 관계식을 모두 모아보겠다.
\[ \begin{align} & \cos d_2 + \cos d_1 =2 \cos \left( \frac{d_2+d_1}{2} \right) \cos \left( \frac{d_2-d_1}{2} \right) \tag{7} \\ \\ & \cos d_2 - \cos d_1 = -2 \sin \left( \frac{d_2+d_1}{2} \right) \sin \left( \frac{d_2-d_1}{2} \right) \\ \\ & \sin d_2 - \sin d_1 = 2 \cos \left( \frac{d_2+d_1}{2} \right) \sin \left( \frac{d_2-d_1}{2} \right) \\ \\ & \sin^2 \frac{d}{2}= \frac{1}{2} (1- \cos d ) \end{align} \]
식 (7)을 적용하면 식 (3), (5), (6)은 각각 다음과 같이 쓸 수 있다.
\[ \begin{align} & c^2= a^2 4 \sin^2 \left( \frac{E_2+E_1}{2} \right) \sin^2 \left( \frac{E_2-E_1}{2} \right) \tag{8} \\ & \ \ \ \ \ \ \ +a^2 (1-e^2 )4 \cos^2 \left( \frac{E_2+E_1}{2} \right) \sin^2 \left( \frac{E_2-E_1}{2} \right) \\ & \ \ \ = 4a^2 \sin^2 \left( \frac{E_2-E_1}{2} \right)-4a^2 e^2 \cos^2 \left( \frac{E_2+E_1}{2} \right) \sin^2 \left( \frac{E_2-E_1}{2} \right) \\ \\ & \ \ \ = 4a^2 \sin^2 \left( \frac{E_2-E_1}{2} \right) \left[ 1-e^2 \cos^2 \left( \frac{E_2+E_1}{2} \right) \right] \\ \\ & r_1 + r_2 = 2a \left[ 1- e \cos \left( \frac{E_2+E_1}{2} \right) \cos \left( \frac{E_2-E_1}{2} \right) \right] \tag{9} \\ \\ & t_2-t_1= \sqrt{ \frac{a^3}{\mu} } \left[ E_2-E_1-2e \cos \left( \frac{E_2+E_1}{2} \right) \sin \left( \frac{E_2-E_1}{2} \right) \right] \tag{10} \end{align} \]
식 (8), (9), (10)을 보면 공통적인 항이 두 개가 보이는데 새로운 변수 \(\kappa\) 와 \(\gamma\) 를 도입하여 이를 간단히 표기하고자 한다.
\[ \begin{align} & \kappa =e \cos \left( \frac{E_2+E_1}{2} \right) \tag{11} \\ \\ & \gamma= \frac{1}{2} (E_2-E_1) \end{align} \]
그러면 식 (8), (9), (10)은 다음과 같이 간략히 표기된다.
\[ \begin{align} & c^2=4a^2 \sin^2 \gamma \ (1-\kappa^2 ) \tag{12} \\ \\ & r_1+r_2=2a(1-\kappa \cos \gamma ) \tag{13} \\ \\ & t_2-t_1= \sqrt{ \frac{a^3}{\mu}} [2 \gamma-2 \kappa \sin \gamma ] \tag{14} \end{align} \]
여기서 목표는 \(\kappa\) 와 \(\gamma\) 를 \(r_1+r_2, c, a\) 의 관계식으로 만드는 것이다. 식 (12)와 (13)에 의하면,
\[ \begin{align} r_1+r_2+c &= 2a(1-\kappa \cos \gamma )+2a \sqrt{1-\kappa^2 } \sin \gamma \tag{15} \\ &=2a \left( 1- \kappa \cos \gamma + \sqrt{ 1- \kappa^2 } \sin \gamma \right) \\ \\ r_1+r_2-c &= 2a(1-\kappa \cos \gamma ) - 2a \sqrt{1-\kappa^2 } \sin \gamma \tag{16} \\ &=2a \left( 1- \kappa \cos \gamma - \sqrt{ 1- \kappa^2 } \sin \gamma \right) \end{align} \]
이 된다. 식 (15)와 (16)의 패턴과 삼각함수 관계식 (7)을 유심히 살펴보면 다음과 같이 새로운 변수 \(\alpha_e\) 와 \(\beta_e\) 를 한번 더 도입하는 것이 식을 더 간단히 만들 수 있는 방법이라는 생각이 들 것이다.
\[ \begin{align} & \kappa= \cos \left( \frac{\alpha_e+ \beta_e}{2} \right) \tag{17} \\ \\ & \gamma = \frac{1}{2} (\alpha_e- \beta_e) \end{align} \]
식 (17)을 식 (14), (15), (16)에 대입하면 다음과 같다.
\[ \begin{align} & t_2-t_1 = \sqrt{ \frac{a^3}{\mu} } \left[ (\alpha_e- \beta_e )-2 \cos \left( \frac{\alpha_e+\beta_e}{2} \right) \sin \left( \frac{\alpha_e- \beta_e}{2} \right) \right] \tag{18} \\ & \ \ \ \ \ \ \ \ \ \ \ = \sqrt{ \frac{a^3}{\mu} } \left[ (\alpha_e- \sin \alpha_e )-( \beta_e- \sin \beta_e ) \right] \\ \\ & r_1+r_2+c =2a(1- \cos \alpha_e ) \tag{19} \\ & \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ =4a \sin^2 \frac{\alpha_e}{2} \\ \\ & r_1+r_2-c=2a(1- \cos \beta_e ) \tag{20} \\ & \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ =4a \sin^2 \frac{\beta_e}{2} \end{align} \]
식 (19)와 (20)으로 부터
\[ \begin{align} \sin \frac{\alpha_e}{2} &= \sqrt{ \frac{r_1+r_2+c}{4a} }= \sqrt{ \frac{s}{2a} } \tag{21} \\ \\ \sin \frac{\beta_e}{2} &= \sqrt{ \frac{r_1+r_2-c}{4a} }= \sqrt{ \frac{s-c}{2a} } \end{align} \]
를 얻을 수 있다. 여기서 \(s= \frac{r_1+r_2+c}{2}\) 로서 삼각형 \(P_1 O P_2\)의 둘레 길이의 반(semi-perimeter)이다.
식 (18)과 (21)은 식 (1)의 형태가 되며, 이를 타원궤도의 램버트 방정식이라고 한다. 램버트 방정식 (18)은 케플러 방정식 (6)과 유사해 보이지만 \(E_1, E_2\) 와 \(\alpha_e, \beta_e\) 는 서로 다른 변수이며, 케플러 방정식보다 풀기가 훨씬 어렵다.
쌍곡선궤도에서도 타원궤도와 유사한 방법으로 램버트 방정식을 유도할 수 있다.
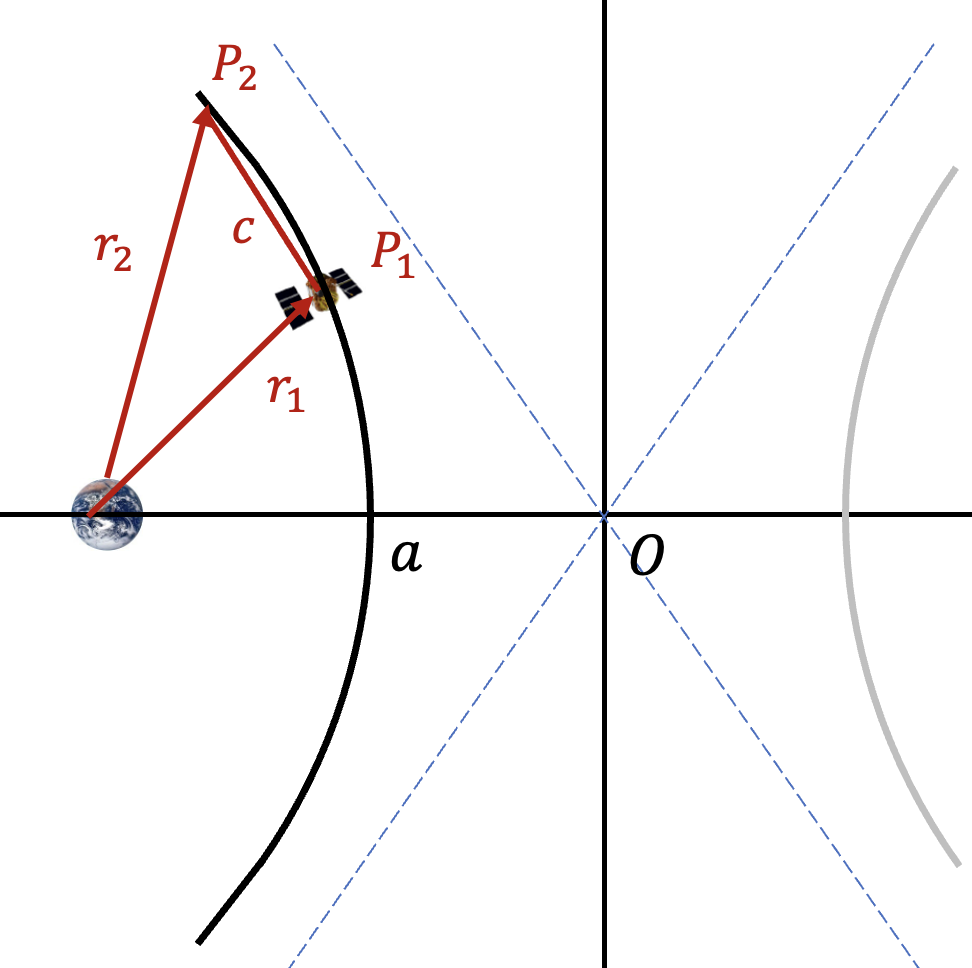
쌍곡선궤도의 케플러 방정식은 다음과 같이 주어진다 (https://pasus.tistory.com/309).
\[ \begin{align} t_2-t_1= \sqrt{ \frac{-a^3}{\mu}} (e \sinh F_2 -F_2-e \sinh F_1 +F_1 ), \ \ \ \ a \lt 0 \tag{22} \end{align} \]
두 지점 \(P_1\) 과 \(P_2\) 의 거리는 기하학적인 관계식을 이용하여 다음과 같이 계산할 수 있다.
\[ \begin{align} r_1 &=-a(e \cosh F_1 -1), \ \ \ \ \ a \lt 0 \tag{23} \\ \\ r_2 &=-a(e \cosh F_2 -1) \end{align} \]
식 (22)와 (23)은 타원궤도와 쌍곡선궤도 수식의 유사성에 의해서도 유도될 수 있었다. 즉 식 (4)와 (6)에서 \(jE \to -F\) 의 치환을 통하면 식 (23)과 (22)를 얻을 수 있다.
이와 같은 유사성을 바탕으로 식 (18)과 (21)은 다음과 같이 \(\sin\) 함수를 \(\sinh\) 함수로 바꾼 형태의 식으로 변환된다.
\[ \begin{align} & t_2-t_1 = \sqrt{ \frac{-a^3}{\mu} } \left[ (\sinh \alpha_h -\alpha_h )-( \sinh \beta_h - \beta_h ) \right], \ \ \ \ a \lt 0 \tag{24} \\ \\ & \sinh \frac{\alpha_h}{2} = \sqrt{ \frac{r_1+r_2+c}{-4a} }= \sqrt{ \frac{s}{-2a} } \tag{25} \\ \\ & \sinh \frac{\beta_h}{2} = \sqrt{ \frac{r_1+r_2-c}{-4a} }= \sqrt{ \frac{s-c}{-2a} } \end{align} \]
식 (24)와 (25)를 쌍곡선궤도의 램버트 방정식이라고 한다.
포물선궤도의 램버트 방정식은 타원궤도에서 장반경을 무한대로 늘려서, 즉 \(a \to \infty\) 로 놓으면 구할 수 있다.
식 (21)에 의하면 \(a \to \infty\) 일 때 \(\alpha_e\) 와 \(\beta_e\) 는 매우 작으므로 다음과 같은 근사식이 성립한다.
\[ \begin{align} & \sin \alpha_e \approx \alpha_e- \frac{1}{6} \alpha_e^3, \ \ \ \ \ \sin \frac{\alpha_e}{2} \approx \frac{\alpha_e}{2} \tag{26} \\ \\ & \sin \beta_e \approx \beta_e- \frac{1}{6} \beta_e^3, \ \ \ \ \ \sin \frac{\beta_e}{2} \approx \frac{\beta_e}{2} \end{align} \]
식 (26)에서 \(\sin \alpha_e \approx \alpha_e \) 로 근사하면 비행시간이 \(0\) 이 되기 때문에 3차 테일러 항에서 절삭했다. 식 (26)을 식 (18)과 (21)에 대입하면 다음과 같이 된다.
\[ \begin{align} & \frac{\alpha_e}{2} = \sqrt{ \frac{r_1+r_2+c}{4a} } = \sqrt{ \frac{s}{2a} } \tag{27} \\ \\ & \frac{\beta_e}{2} = \sqrt{ \frac{r_1+r_2-c}{4a} } = \sqrt{ \frac{s-c}{2a} } \\ \\ & t_2-t_1 = \frac{1}{6} \sqrt{ \frac{a^3}{\mu} } [ \alpha_e^3-\beta_e^3 ] \tag{28} \\ & \ \ \ \ \ \ \ \ \ \ \ \ = \frac{1}{6 \sqrt{\mu} } \left[ (r_1+r_2+c)^{3/2}-(r_1+r_2-c)^{3/2} \right] \\ & \ \ \ \ \ \ \ \ \ \ \ \ = \frac{1}{3} \sqrt{ \frac{2}{\mu} } \left( s^{3/2}-(s-c)^{3/2} \right) \end{align} \]
식 (28)을 포물선궤도의 램버트 방정식이라고 한다.
정리하면 각 궤도에서 램버트 방정식은 다음과 같다.
\[ \begin{align} & \mbox{타원궤도:} \\ \\ & \ \ \ \ \ t_2-t_1=\sqrt{ \frac{a^3}{\mu} } \left[ (\alpha_e- \sin \alpha_e )-( \beta_e- \sin \beta_e ) \right] \\ & \ \ \ \ \ \sin \frac{\alpha_e}{2} = \sqrt{ \frac{r_1+r_2+c}{4a} }= \sqrt{ \frac{s}{2a} } \\ & \ \ \ \ \ \sin \frac{\beta_e}{2} = \sqrt{ \frac{r_1+r_2-c}{4a} }= \sqrt{ \frac{s-c}{2a} } \\ \\ \\ & \mbox{쌍곡선궤도:} \\ \\ & \ \ \ \ \ t_2-t_1 = \sqrt{ \frac{-a^3}{\mu} } \left[ (\sinh \alpha_h -\alpha_h )-( \sinh \beta_h - \beta_h ) \right], \ \ \ \ a \lt 0 \\ & \ \ \ \ \ \sinh \frac{\alpha_h}{2} = \sqrt{ \frac{r_1+r_2+c}{-4a} }= \sqrt{ \frac{s}{-2a} } \\ & \ \ \ \ \ \sinh \frac{\beta_h}{2} = \sqrt{ \frac{r_1+r_2-c}{-4a} }= \sqrt{ \frac{s-c}{-2a} } \\ \\ \\ & \mbox{포물선궤도:} \\ \\ & \ \ \ \ \ t_2-t_1 = \frac{1}{6 \sqrt{\mu} } \left[ (r_1+r_2+c)^{3/2}-(r_1+r_2-c)^{3/2} \right] \\ & \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ = \frac{1}{3} \sqrt{ \frac{2}{\mu} } \left( s^{3/2}-(s-c)^{3/2} \right) \end{align} \]
'항공우주 > 우주역학' 카테고리의 다른 글
| 감시정찰 (Surveillance and Reconnaissance) 영역 계산 (0) | 2023.12.26 |
|---|---|
| 램버트 문제 (Lambert’s problem)의 해 (0) | 2023.12.10 |
| 케플러 문제 (Kepler’s problem) - 5 (0) | 2023.12.02 |
| 케플러 문제 (Kepler’s problem) - 4 (0) | 2023.12.01 |
| 라그랑지 계수 (Lagrange coefficients) - 2 (0) | 2023.11.30 |




댓글