어떤

한편 식 (2)의 기본행렬
여기서
여기서
여기서
또한 두 싯점간의 상태변수를 매핑해 준다.
식 (6)과 (8)에 의하면,
이므로 주기궤도
이제 라그랑지 포인트(Langrage point)에서의 주기함수의 모노드로미 행렬의 고유값을 구해보도록 하자. 라그랑지 포인트에서의 주기궤도의 선형화 미분방정식은 식 (2)로 주어지며 그 때의 상태변수는 다음과 같다 (https://pasus.tistory.com/280).
한편 원궤도제한 삼체문제(CR3BP)의 운동 방정식은 해밀톤(Hamilton) 방정식으로도 유도할 수 있다 (https://pasus.tistory.com/158). 일반화 좌표
해밀토니안 함수(Hamiltonian function)를 다음과 같이 정의한다면,
해밀톤 표준 방정식에 의해서 CR3BP의 운동 방정식을 얻을 수 있다 (https://pasus.tistory.com/147).
식 (14)를 상태변수
위 식으로부터 기준 주기궤도
여기서
이다. 선형 미분방정식 (16)의 상태천이행렬
그리고 시간
이제 상태천이행렬
위 식을 미분하면 식 (17)에 의해서 다음과 같이 된다.
따라서
이기 때문에
이제 시스템 (2)의 상태천이행렬을 구하기 위하여 식 (18)을 이용하기로 한다. 상태변수
식 (22)를 식 (18)에 대입하면 다음과 같이 된다.
위 식을 식 (8)과 비교하면 시스템 (2)의 상태천이행렬
위 식에 의하면
식 (24)를 (21)에 대입하면,
이 되어서
시스템 (2)의 모노드로미 행렬은 식 (6)에 의하면 다음과 같다.
따라서 모노드로미 행렬은 행렬식이 항상
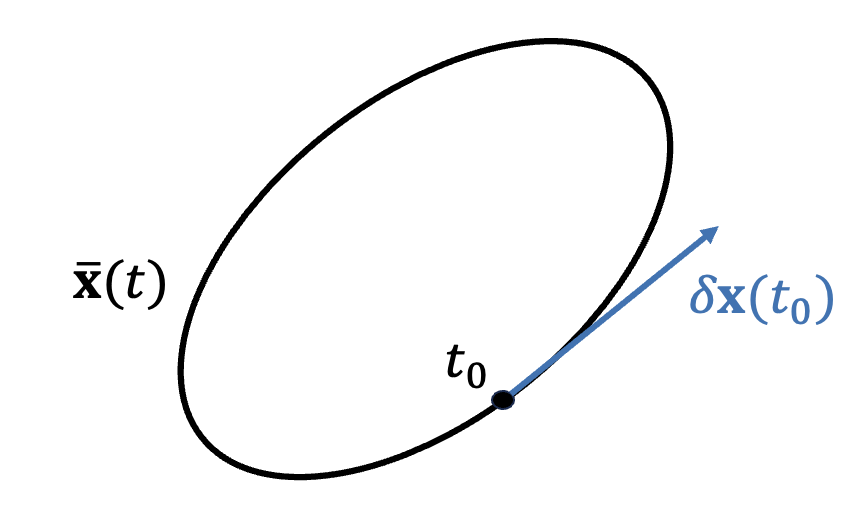
만약 주기궤도의 섭동
이 되므로
주기궤도의 안정성은
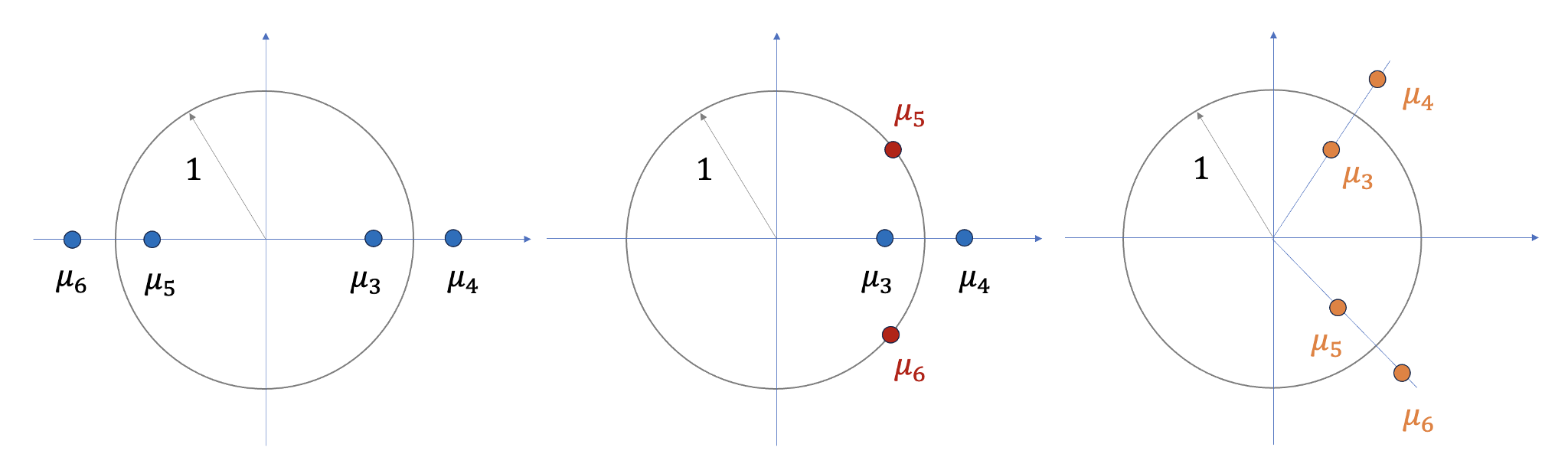
모노드로미 행렬
한편 식 (1)을 시간 미분하면 다음과 같다.
식 (29)와 (2)에 의해서 만약
이이 성립한다. 따라서
'항공우주 > 우주역학' 카테고리의 다른 글
| 궤도요소 (COE) 계산 (0) | 2023.07.26 |
|---|---|
| 고전 궤도요소 (Classical Orbital Elements) (0) | 2023.07.24 |
| [CR3BP] 헤일로 궤도 (Halo Orbit) 계산 (0) | 2023.07.14 |
| [CR3BP] 리야프노프 궤도 (Lyapunov Orbit) 계산 (0) | 2023.07.11 |
| [CR3BP] 주기궤도 (Periodic Orbit)의 조건 (0) | 2023.07.04 |



댓글