전투기 교전 운동 모델, 비행기 성능(performance) 해석 모델, 그리고 단거리 미사일 운동 모델로서 다음과 같이 평평한 지구(flat Earth) 가정 하에서 유도된 질점(point mass) 운동 모델을 많이 사용한다 (https://pasus.tistory.com/181).
\[ \begin{align} & \dot{x} =V \cos \psi \cos \gamma \tag{1} \\ \\ & \dot{y}=V \sin \psi \cos \gamma \\ \\ & \dot{h}=V \sin \gamma \\ \\ & \dot{V}= -\frac{D}{m}+ \frac{T \cos \epsilon }{m} -g \sin \gamma \\ \\ & \dot{\psi} = \frac{ (L+T \sin \epsilon ) \sin \sigma}{mV \cos \gamma} \\ \\ & \dot{\gamma}= \frac{(L+T \sin \epsilon ) \cos \sigma }{mV}- \frac{g \cos \gamma}{V} \end{align} \]
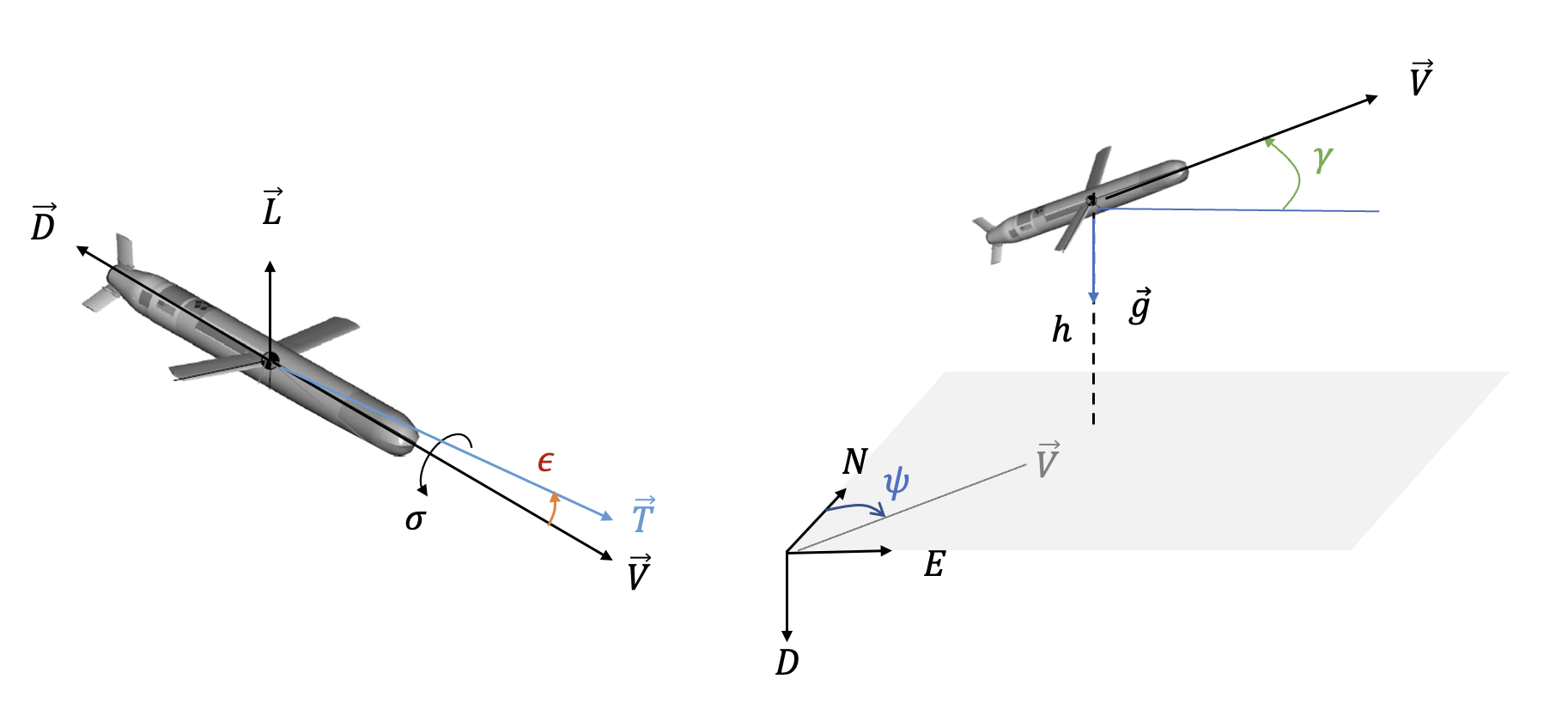
여기서 \(\psi\) 는 북쪽 방향에서 동쪽 방향으로 측정한 항공기 속도벡터 \(\vec{V}\) 의 방위각(heading angle), \(\gamma\) 는 비행경로각(flight path angle)으로서 수평면과 속도벡터가 이루는 각이다. \(\sigma\) 는 속도벡터를 중심으로 회전한 뱅크각(bank angle), \(\epsilon\) 은 추력벡터 \(\vec{T}\) 와 속도벡터의 사잇각이다. 항공기 센터 라인과 추력벡터가 일치한다고 가정하면 \(\epsilon\) 은 받음각(angle of attack)으로 해석할 수 있다.
양력 \(L\) 과 항력 \(D\) 는 각각 다음과 같이 모델링한다.
\[ \begin{align} & L= \frac{1}{2} \rho V^2 SC_L (\alpha, Ma) \tag{2} \\ \\ & D= \frac{1}{2} \rho V^2 SC_D (\alpha, Ma) \end{align} \]
여기서 \(\rho, S, C_L, C_D, \alpha, Ma\) 는 각각 공기 밀도, 기준 면적, 양력계수, 항력계수, 받음각, 마하수(Mach number)이다.
비행기 성능해석에서는 보통 추력벡터와 속도벡터를 같은 방향으로 가정하여 \(\epsilon=0\) 으로 둔다.
양력이나 항력을 계산하기 위한 공력 모델이 없는 경우에는 다음과 같이 양력과 항공기 무게의 비율인 하중계수(load factor) \(n_z\) 와, 이와 유사하게 정의된 전진력(추력-항력) 대 무게 비율인 가속계수 \(n_x\) 를 사용하여 식 (1)을 수정한다.
\[ \begin{align} & n_z= \frac{L}{mg} \tag{3} \\ \\ & n_x= \frac{T-D}{mg} \end{align} \]
\(\epsilon =0\) 으로 가정하면 식 (1)은 다음과 같이 된다.
\[ \begin{align} & \dot{x} =V \cos \psi \cos \gamma \tag{4} \\ \\ & \dot{y}=V \sin \psi \cos \gamma \\ \\ & \dot{h}=V \sin \gamma \\ \\ & \dot{V}=g( n_x - \sin \gamma) \\ \\ & \dot{\psi} = \frac{g}{V} \frac{n_z \sin \sigma }{\cos \gamma} \\ \\ & \dot{\gamma} = \frac{g}{V} (n_z \cos \sigma - \cos \gamma ) \end{align} \]
여기서 \(n_x, n_z, \sigma\) 를 직접 제어할 수 있다고 가정하여 제어변수로 사용한다. 식 (4)는 무인 전투기의 교전이나 미사일 회피 기동 제어기 설계를 위한 운동 모델로 많이 사용된다.
전투기 교전 운동 모델에서는 에너지 기동성(energy maneuverability) 분석을 위해서 다음과 같이 항공기 무게 대비 역학 에너지(mechanical energy) \(E_s\) 를 운동에너지와 위치에너지의 합으로 정의하고,
\[ \begin{align} E_s &= \frac{\frac{1}{2} mV^2+mgh}{mg} \tag{5} \\ \\ &= \frac{V^2}{2g}+h \end{align} \]
그 미분 방정식을 식 (1) 또는 (4)의 운동 방정식과 함께 사용하기도 한다.
\[ \begin{align} \dot{E}_s &= \frac{V \dot{V}}{g}+\dot{h} \tag{6} \\ \\ &= \frac{(T-D)V}{mg} -V \sin \gamma +V \sin \gamma \\ \\ &= \frac{(T-D)V}{mg} \end{align} \]
'항공우주 > 비행역학' 카테고리의 다른 글
| 전기 항공기의 항속시간(Endurance)과 항속거리(Range) (0) | 2022.10.03 |
|---|---|
| 프로펠러기의 항속시간(Endurance)과 항속거리(Range) (0) | 2022.10.03 |
| 제트기의 항속시간(Endurance)과 항속거리(Range) (0) | 2022.10.02 |
| NED 좌표계와 LLH 좌표계간의 속도 변환식 (0) | 2022.01.09 |
| 원형 지구 가정에 의한 미사일 운동 방정식 유도 (0) | 2021.12.23 |




댓글