\(N\) 개의 질점으로 이루어진 시스템이 있다고 하자. 각 질점에 작용하는 합력을 \(\mathbf{R}_k\) 이라고 할 때 시스템이 정적 평형 상태에 있다면 \(\mathbf{R}_k=0\) 이다. 그러면 합력이 질점에 하는 가상일(virtual work)은 \(\mathbf{R}_k \cdot \delta \mathbf{r}_k = 0 \) 이다.
전체 시스템에 대한 가상일은 각 질점의 가상일을 모두 합하면 된다. 전체 가상일도 \(0\) 이다.
\[ \delta W= \sum_{k=1}^N \mathbf{R}_k \cdot \delta \mathbf{r}_k = 0 \tag{1} \]
이제 합력을 외력 \(\mathbf{F}_k\) 와 구속력 \(\mathbf{F}_k^\prime\) 의 합으로 분리하자. 그러면 위 식은 다음과 같이 된다.
\[ \delta W= \sum_{k=1}^N (\mathbf{F}_k + \mathbf{F}^\prime) \cdot \delta \mathbf{r}_k = 0 \tag{2} \]
여기서 가상 변위의 정의에 의해서 구속력이 가상 변위를 따라 하는 일은 \(0\) 이다.
\[ \sum_{k=1}^N \mathbf{F}^\prime \cdot \delta \mathbf{r}_k = 0 \tag{3} \]
그러면 식 (3)과 (2)에 의해서 외력이 가상 변위를 따라 하는 일의 총합도 \(0\) 이 된다.
\[ \sum_{k=1}^N \mathbf{F} \cdot \delta \mathbf{r}_k = 0 \tag{4} \]
위 식을 가상일의 원리(principle of virtual work)라고 한다. 외력이 시스템의 구속조건을 만족하는 가상 변위를 따라가면서 한 일의 총합은 \(0\) 이라는 얘기다. 반면에 일반적인 경우 구속력이 실제 하는 일은 \(0\) 이 아니다.
\[ \sum_{k=1}^N \mathbf{F}^\prime \cdot d \mathbf{r}_k \ne 0 \tag{5} \]
이와 같이 일반적으로 구속력은 모르거나 계산하기 어렵다는 점에서 실제 일보다 가상일을 이용하는 데 장점이 있다.
가상일의 원리는 정적 평형 상태에 있는 시스템에 관한 것으로 동적인 문제에는 적용할 수 없다. 가상일의 원리를 동적 시스템에도 적용할 수 있게 한 것이 달랑베르의 원리(D'Alembert’s principle)이다.
뉴톤의 운동 법칙에 의하면 질점 \(m_k\) 에 대해서 다음 식이 성립한다.
\[ \mathbf{F}_k+ \mathbf{F}_k^\prime= \dot{\mathbf{p}}_k \tag{6} \]
여기서 \(\mathbf{p}_k=m_k \dot{\mathbf{r}}_k\) 는 선형 운동량이다. 위 식에서 오른쪽 항을 왼쪽 항으로 넘기면 다음과 같이 된다.
\[ \mathbf{F}_k+ \mathbf{F}_k^\prime - \dot{\mathbf{p}}_k =0 \tag{7} \]
여기서 \(-\dot{\mathbf{p}}_k\) 를 또다른 힘으로 보면 위 식을 동적 평형 상태에 있는 시스템에 관한 식으로 볼 수 있다. \(-\dot{\mathbf{p}}_k\) 를 관성력(inertia force)이라고 한다.
식 (7)은 동적 시스템의 문제를 마치 정적 시스템의 문제로 볼 수 있게 해준다. 가상일의 원리를 위 시스템에 적용하면 다음과 같다.
\[ (\mathbf{F}_k+ \mathbf{F}_k^\prime - \dot{\mathbf{p}}_k ) \cdot \delta \mathbf{r}_k=0 \tag{8} \]
여기서 \(\delta \mathbf{r}_k\) 는 시스템의 구속조건을 만족하는 가상 변위이다. 구속력이 가상 변위를 따라 하는 일은 \(0\) 이므로 \(N\) 개의 질점으로 이루어진 시스템에 대해서 다음 식이 성립한다.
\[ \sum_{k=1}^N (\mathbf{F}_k - \dot{\mathbf{p}}_k ) \cdot \delta \mathbf{r}_k=0 \tag{9} \]
위 식을 달랑베르의 원리라고 한다.
이제 외력 \(\mathbf{F}_k\) 에 의한 가상일을 계산하면 다음과 같다.
\[ \delta W =\sum_{k=1}^N \mathbf{F}_k \cdot \delta \mathbf{r}_k \tag{10} \]
다음 관계식을 이용하여
\[ \begin{align} \frac{d}{dt} (\dot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k ) &= \ddot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k + \dot{\mathbf{r}}_k \cdot \delta \dot{\mathbf{r}}_k \\ \\ &= \ddot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k + \frac{1}{2} \delta (\dot{\mathbf{r}}_k \cdot \dot{\mathbf{r}}_k ) \end{align} \]
이 식에 질량 \(m_k\) 를 곱한 후 전체 시스템에 대해서 합을 구해보면,
\[ \sum_{k=1}^N m_k \ddot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k = \sum_{k=1}^N m_k \frac{d}{dt} (\dot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k )-\delta T \tag{11} \]
이 된다. 식 (10)에서 \(\mathbf{F}_k= m_k \ddot{\mathbf{r}}_k\) 이므로 식 (11)과 비교하면,
\[ \delta T + \delta W = \sum_{k=1}^N m_k \frac{d}{dt} (\dot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k ) \tag{12} \]
이 된다.
그림과 같이 시간 \(t_1\) 과 \(t_2\) 에서 양 끝단이 고정되어 있는 실제 경로를 생각해 보자. 가상 경로는 실제 경로에서 가상 변위 \(\delta \mathbf{r}_k (t)\) 만큼 변화된 경로이다.
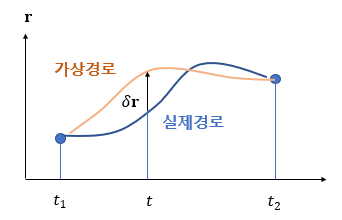
수많은 가상 경로 중에서 양 끝단이 실제 경로와 일치하는 경로만 고려해 보면,
\[ \delta \mathbf{r}_k (t_1 )= \delta \mathbf{r}_k (t_2 )=0 \tag{13} \]
이다. 식 (12)를 시간 구간 \(t_1\) 과 \(t_2\) 에서 적분하면,
\[ \begin{align} \int_{t_1}^{t_2} (\delta T + \delta W) \ dt &= \int_{t_1}^{t_2} \sum_{k=1}^N m_k \frac{d}{dt} (\dot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k ) \ dt \tag{14} \\ \\ &= \left[ \sum_{k=1}^N m_k (\dot{\mathbf{r}}_k \cdot \delta \mathbf{r}_k) \right]^{t_2}_{t_1} \\ \\ &= 0 \end{align} \]
이 된다. 이 식을 해밀톤의 원리의 확장 버전(extended Hamilton's principle) 이라고 한다.
확장된 해밀톤의 원리가 성립하기 위한 가정은 다음과 같다.
(1) 가상 변위 \(\delta \mathbf{r}_k\) 는 시스템의 순간적인 구속조건을 만족해야 한다.
(2) 경로의 양 끝단에서 시간과 위치는 고정되야 한다.
만약 외력을 모두 포텐셜 에너지 함수로부터 얻을 수 있다면 외력에 의한 가상일은 다음과 같이 포텐셜 에너지 함수로 표현할 수 있다.
\[ \delta W = - \delta V \tag{15} \]
라그랑지안(Lagrangian) \(L\) 을 다음과 같이 운동 에너지와 포텐셜 에너지의 차이로 정의하면,
\[ L=T-V \tag{16} \]
식 (14)는 다음과 같이 된다.
\[ \int_{t_1}^{t_2} \delta L \ dt=0 \tag{17} \]
식 (17)을 해밀톤 원리의 비홀로노믹(nonholonomic) 형태라고 한다.
비홀로노믹 시스템에 대한 해밀톤의 확장 원리가 성립하기 위한 가정은 다음과 같다.
(1) 가상 변위 \(\delta \mathbf{r}_k\) 는 시스템의 순간적인 구속조건을 만족해야 한다.
(2) 경로의 양 끝단에서 시간과 위치는 고정되야 한다.
(3) 모든 외력이 포텐셜 에너지 함수로부터 유도되야 한다.
모든 외력이 포텐셜 에너지 함수로부터 유도되야 한다고 해서 시스템이 보존 시스템(conservative system)일 필요는 없다. 포텐셜 에너지 함수가 시간의 함수라면 에너지 보존법칙이 성립하지 않지만 가상 에너지는 보존된다. 왜냐하면 가상 에너지는 시간 \(dt=0\) 인 순간적인 가상의 에너지이기 때문이다.
만약 홀로노믹(holonomic) 시스템인 경우에는 식 (17)은 다음과 같이 된다.
\[ \delta \int_{t_1}^{t_2} L \ dt=0 \tag{18} \]
식 (18)을 해밀톤의 원리(Hamilton's principle)라고 한다. 해밀톤 원리를 수식으로 표현한 것 중에서 가장 유명한 식이다. 또한 식 (18)을 최소 작용의 원리(principle of least action)라고도 한다.
해밀톤의 원리에 의하면 고정된 양 끝단을 연결하는 수많은 경로 중에서 실제 경로는 '작용(action)'을 최소화하는 경로다. 여기서 작용은 라그랑지안을 시간 구간 \(t_1\) 과 \(t_2\) 에서 적분한 것 \(\int_{t_1}^{t_2} L \ dt\) 를 말한다.
해밀톤 원리가 성립하기 위한 가정은 다음과 같다.
(1) 가상 변위 \(\delta \mathbf{r}_k\) 는 시스템의 순간적인 구속조건을 만족해야 한다.
(2) 경로의 양 끝단에서 시간과 위치는 고정되야 한다.
(3) 모든 외력이 포텐셜 에너지 함수로부터 유도되야 한다.
(4) 홀로노믹 시스템이어야 한다.
해밀톤의 원리로부터 라그랑지 방정식이 유도된다. 해밀톤 방정식은 라그랑지 방정식으로부터 유도된다. 이에 대해서는 다음에 논하기로 한다.
'항공우주 > 동역학' 카테고리의 다른 글
| 라그랑지 방정식 (Lagrange’s Equation) (0) | 2021.08.08 |
|---|---|
| 일반화 좌표 (Generalized Coordinate) (0) | 2021.08.08 |
| 홀로노믹 구속 (Holonomic Constraint)과 가상 변위 (0) | 2021.08.04 |
| 포텐셜 에너지 (Potential Energy) (0) | 2021.08.03 |
| 기본 운동학 방정식 (BKE) (0) | 2021.04.13 |




댓글