다음과 같이 상태변수의 선형 미분 방정식으로 표현되는 운동 방정식이 있다고 하자.
\[ \dot{\mathbf{x}}=A \mathbf{x} \tag{1} \]
여기서 \(\mathbf{x}(t) \in \mathbb{R}^n\) 는 상태변수, \(A \in \mathbb{R}^{n \times n}\) 는 상수 행렬이다.
이 시스템의 해는 다음과 같다.
\[ \mathbf{x}(t)= e^{At} \mathbf{x}(0) \tag{2} \]
이전 포스트에서는 행렬지수함수(matrix exponential) \(e^{At}\) 의 계산에 대해서 알아보았다 (https://pasus.tistory.com/233). 시스템 (1)의 운동 특성은 행렬 \(A\) 의 고유값과 고유벡터에 따라 달라진다. 먼저 행렬 \(A\) 가 서로 다른 \(n\) 개의 고유값 \(\lambda_1, \lambda_2, ..., \lambda_n \in \mathbb{C}\) 를 갖는 경우에 대해서 알아본다.
고유값 \(\lambda_1, \lambda_2, ..., \lambda_n \) 에 대응하는 고유벡터를 \(\mathbf{v}_1, \mathbf{v}_2, ..., \mathbf{v}_n\) 이라고 하면 식 (2)는 다음과 같이 쓸 수 있다.
\[ \mathbf{x}(t)= [ \mathbf{v}_1 \ \mathbf{v}_2 \ \cdots \ \mathbf{v}_n ] \begin{bmatrix} e^{\lambda_1 t} & & & \\ & e^{\lambda_2 t} & & \\ & & \ddots & \\ & & & e^{\lambda_n t} \end{bmatrix} [ \mathbf{v}_1 \ \mathbf{v}_2 \ \cdots \ \mathbf{v}_n ]^{-1} \ \mathbf{x}(0) \tag{3} \]
여기서 초기값 \(\mathbf{x}(0)\) 를 고유벡터의 선형 조합으로 표현하고
\[ \begin{align} \mathbf{x}(0) &= c_1 \mathbf{v}_1+c_2 \mathbf{v}_2+ \cdots + c_n \mathbf{v}_n \tag{4} \\ \\ &= [ \mathbf{v}_1 \ \mathbf{v}_2 \ \cdots \ \mathbf{v}_n ] \begin{bmatrix} c_1 \\ c_2 \\ \vdots \\c_n \end{bmatrix} \end{align}\]
이를 식 (3)에 대입하면 시스템의 해는 다음과 같이 된다.
\[ \mathbf{x}(t) = c_1 e^{\lambda_1 t} \mathbf{v}_1+c_2 e^{\lambda_2 t} \mathbf{v}_2+ \cdots + c_n e^{\lambda_n t} \mathbf{v}_n \tag{5} \]
만약 고유값이 복소수라면 고유값과 고유벡터를 실수화하는 것이 편리하다. 예를 들어 고유값 \(\lambda_1, \lambda_2\) 와 고유벡터 \(\mathbf{v}_1, \mathbf{v}_2\) 가 다음과 같이 켤레복소수로 주어진다면,
\[ \lambda_{1,2} = \sigma \pm j \omega , \ \ \ \mathbf{v}_{1,2}= \mathbf{v}_R \pm j \mathbf{v}_I \]
식 (2)는 다음과 같이 쓸 수 있다.
\[ \begin{align} \mathbf{x}(t) &= [ \mathbf{v}_R \ \mathbf{v}_I \ \cdots \ \mathbf{v}_n ] \begin{bmatrix} e^{\sigma t} \cos ( \omega t) & e^{\sigma t} \sin ( \omega t) & & \\ - e^{\sigma t} \sin ( \omega t) & e^{\sigma t} \cos ( \omega t) & & \\ & & \ddots & \\ & & & e^{\lambda_n t} \end{bmatrix} \tag{6} \\ \\ & \ \ \ \ \ \ \ \ \ \ [ \mathbf{v}_R \ \mathbf{v}_I \ \cdots \ \mathbf{v}_n ]^{-1} \ \mathbf{x}(0) \end{align} \]
그러면 식 (5)도 다음과 같이 바뀌게 된다.
\[ \begin{align} \mathbf{x}(t) &= e^{\sigma t} ( c_1 \cos ( \omega t)+ c_2 \sin ( \omega t) ) \mathbf{v}_R \tag{7} \\ \\ & \ \ \ + e^{\sigma t} ( c_2 \cos ( \omega t) - c_1 \sin ( \omega t) ) \mathbf{v}_I + \cdots + c_n e^{\lambda_n t} \mathbf{v}_n \end{align} \]
만약 행렬 \(A\) 의 고유값이 2개 이상의 중근(repeated eigenvalues)을 갖는다면 해당 고유값 \(\lambda_m\) 에 대한 \( nullity(\lambda_m I-A)\) 에 따라 여러 형태의 조단 표준형을 갖는 해를 구할 수 있다. 예를 들어 고유값 \(\lambda_1=\lambda_2\) 이고 이에 대응하는 고유벡터가 \(\mathbf{v}_1\), 일반화 고유벡터가 \(\mathbf{v}_2\) 라면, 식 (2)는 다음과 같이 쓸 수 있다.
\[ \mathbf{x}(t)= [ \mathbf{v}_1 \ \mathbf{v}_2 \ \cdots \ \mathbf{v}_n ] \begin{bmatrix} e^{\lambda_1 t} & t e^{\lambda_1 t} & & \\ & e^{\lambda_1 t} & & \\ & & \ddots & \\ & & & e^{\lambda_n t} \end{bmatrix} [ \mathbf{v}_1 \ \mathbf{v}_2 \ \cdots \ \mathbf{v}_n ]^{-1} \ \mathbf{x}(0) \tag{8} \]
그러면 식 (5)도 다음과 같이 바뀌게 된다.
\[ \mathbf{x}(t) = (c_1 +c_2 t ) e^{\lambda_1 t} \mathbf{v}_1 + c_2 e^{\lambda_1 t} \mathbf{v}_2+ \cdots + c_n e^{\lambda_n t} \mathbf{v}_n \tag{9} \]
식 (5), (6), (7)에서 만약 초기값 \(\mathbf{x}(0)\) 가 특정 부분공간에서 시작했다면, 예를 들어 \(\mathbf{x}(0)=c_1 \mathbf{v}_1+c_2 \mathbf{v}_2\) 이면, \(\mathbf{x}(t)\) 도 상황에 따라서 각각 다음과 같이 되어서
\[ \begin{align} & \mathbf{x}(t) = c_1 e^{\lambda_1 t} \mathbf{v}_1+c_2 e^{\lambda_2 t} \mathbf{v}_2 \\ \\ & \mathbf{x}(t)= e^{\sigma t} (c_1 \cos (\omega t)+c_2 \sin (\omega t) ) \mathbf{v}_1+ e^{\sigma t} (c_2 \cos (\omega t)-c_1 \sin ( \omega t) ) \mathbf{v}_2 \\ \\ & \mathbf{x}(t)=(c_1 +c_2 t ) e^{\lambda_1 t} \mathbf{v}_1+c_2 e^{\lambda_1 t} \mathbf{v}_2 \end{align} \]
해당 특정 부분공간에 남아 있게 된다.
\(A\) 의 고유값 중에서 실수부가 음수인 고유값에 해당하는 (일반화)고유벡터 집합을 \( \{ \mathbf{v}_1, ..., \mathbf{v}_s \}\) 로 표시하고, 실수부가 양수인 고유값에 해당하는 (일반화)고유벡터 집합을 \(\{ \mathbf{v}_{s+1}, ..., \mathbf{v}_{s+u} \}\) 로, 실수부가 \(0\) 인 고유값에 해당하는 (일반화)고유벡터 집합을 \(\{ \mathbf{v}_{s+u+1}, ..., \mathbf{v}_{s+u+c} \}\) 로 표시한다면, \(n\) 차원 벡터공간 \(\mathbb{R}^n\) 은 다음으로 정의되는 \(\mathbb{E}^s\), \(\mathbb{E}^u\) 및 \(\mathbb{E}^c\) 로 표시된 세개의 공간으로 분할할 수 있다.
\[ \begin{align} & \mathbb{E}^s= span \{ \mathbf{v}_1, \ ... , \ \mathbf{v}_s \} \tag{10} \\ \\ & \mathbb{E}^u= span \{ \mathbf{v}_{s+1}, \ ... , \ \mathbf{v}_{s+u} \} \\ \\ & \mathbb{E}^c= span \{ \mathbf{v}_{s+u+1}, \ ... , \ \mathbf{v}_{s+u+c} \}, \ \ \ s+u+c=n \end{align} \]
\(\mathbb{E}^s\), \(\mathbb{E}^u\) 및 \(\mathbb{E}^c\) 를 각각 안정 부분공간(stable subspace), 불안정(unstable) 부분공간 및 센터(center) 부분공간이라고 한다. 또한 불변(invariant) 부분공간 또는 불변 매니폴드(manifold, 다형체)라고도 한다. 불변인 이유는 초기값 \(\mathbf{x}(0)\) 가 특정 부분공간에서 시작했다면 \(\mathbf{x}(t), \ t \ge 0\) 도 해당 특정 부분공간에 영원히 남아 있기 때문이다.
특히 \(\mathbb{E}^s\) 에서 시작하는 해 \(\mathbf{x}(t)\) 는 \(t \to +\infty\) 일 때 점근적으로 \(\mathbf{x}(t)=0\) 으로 접근하고, \(\mathbb{E}^u\) 에서 시작하는 해는 \(t \to - \infty\) 일 때 점근적으로 \(\mathbf{x}(t)=0\) 에 접근한다.
예를 들어 보자. 다음과 같은 시스템이 있다.
\[ \dot{\mathbf{x}}= \begin{bmatrix} 0 & 1 \\ -2 & -3 \end{bmatrix} \mathbf{x} \tag{11} \]
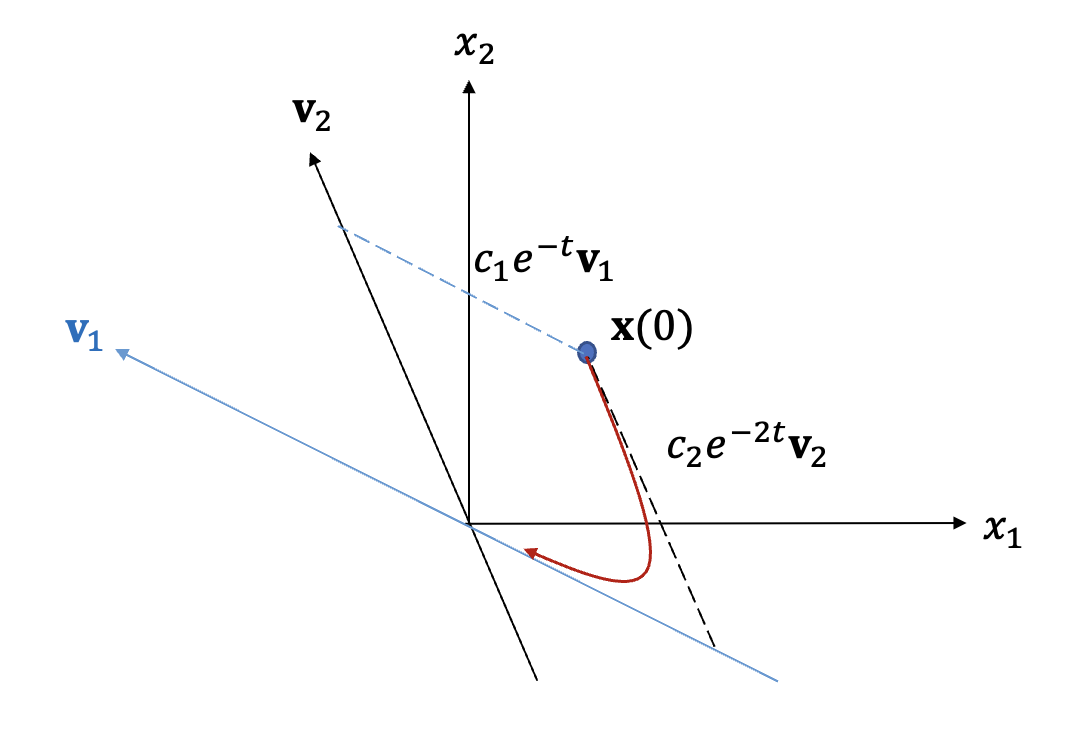
고유값은 \( (\lambda_1, \lambda_2 )=(-1, -2)\) 이고 고유벡터는 \( [ \mathbf{v}_1 \ \mathbf{v}_2 ] =\begin{bmatrix} 1 & 1 \\ -1 & -2 \end{bmatrix} \)이다. 이 경우 \(\mathbb{E}^s = span \{ \mathbf{v}_1, \mathbf{v}_2 \}\) 이다. 다양한 초기값에 대해서 \( \mathbf{x}(t)\) 의 궤적을 그려보면 다음과 같다.

위 그림에 고유벡터의 방향이 표시되어 있다. 모드별로 수렴 속도에 차이가 있는데 \(\mathbf{v}_1\) 은 \(e^{-t}\) 로, \(\mathbf{v}_2\) 는 \( e^{-2t}\) 로서 수렴속도가 \(\mathbf{v}_2\) 가 더 빠르다.
다른 예를 들어보자. 다음과 같은 시스템이 있다.
\[ \dot{\mathbf{x}}= \begin{bmatrix} -1 & 1 & 0 \\ -1 & -1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \mathbf{x} \tag{12} \]
이 시스템의 고유값은 두 개의 결레복소수 \(\lambda_{1,2}= -1 \pm j1\) 과 한 개의 양의 실수 고유값 \(\lambda_3=1\) 이고 실수화된 고유벡터는 \( [ \mathbf{v}_1 \ \mathbf{v}_2 \ \mathbf{v}_3 ] = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \) 이다. 이 경우 \(\mathbb{E}^s= span \{\mathbf{v}_1, \mathbf{v}_2 \}\), \( \mathbb{E}^u= span \{ \mathbf{v}_3 \}\) 이다. 다양한 초기값에 대해서 \(\mathbf{x}(t)\) 의 궤적을 그려보면 다음과 같다.

안정 부분공간 \(\mathbb{E}^s\) 에서 출발한 궤적은 모두 \(0\) 으로 수렴하는 반면, 그렇지 않은 궤적은 모두 불안정 부분공간인 \(\mathbb{E}^u\), 즉 \(\mathbf{v}_3\) 축을 따라서 무한대로 발산하는 것을 볼 수 있다.
마지막 예로 다음 시스템을 보자.
\[ \dot{\mathbf{x}}= \begin{bmatrix} 0 & 1 & 0 \\ -4 & 0 & 0 \\ 0 & 0 & -3 \end{bmatrix} \mathbf{x} \tag{13} \]
이 시스템의 고유값은 두 개의 허수 \(\lambda_{1,2} = \pm j2\) 와 한 개의 음의 실수 고유값 \(\lambda_3=-3\) 이고 실수화된 고유벡터는 \( [ \mathbf{v}_1 \ \mathbf{v}_2 \ \mathbf{v}_3 ] = \begin{bmatrix} 0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \end{bmatrix} \) 이다. 이 경우 \( \mathbb{E}^c= span \{\mathbf{v}_1, \mathbf{v}_2 \}\), \( \mathbb{E}^s= span \{ \mathbf{v}_3 \}\) 이다. 다양한 초기값에 대해서 \(\mathbf{x}(t)\) 의 궤적을 그려보면 다음과 같다.

궤적은 모두 안정 부분공간인 \(\mathbb{E}^s\), 즉 \(\mathbf{v}_3\) 축을 따라서 센터 부분공간인 \(\mathbb{E}^c\), 즉 \( \mathbf{v}_1\) 과 \(\mathbf{v}_2\) 축으로 이루어진 평면으로 수렴하며, 결국 센터 부분공간에서 원점을 중심으로 하는 타원궤적이 되는 것을 볼 수 있다.
'유도항법제어 > 비행제어' 카테고리의 다른 글
| [DI-1] 동적 역변환 (Dynamic Inversion) (0) | 2023.01.04 |
|---|---|
| 비선형 시스템과 매니폴드 (Manifold) (0) | 2023.01.01 |
| 행렬지수함수 (Matrix Exponential) 계산 (0) | 2022.12.24 |
| 리야프노프 안정성 (Lyapunov stability) 이론 (0) | 2022.09.30 |
| 리야프노프 안정성 (Lyapunov stability) 개념 (0) | 2022.09.27 |




댓글