J2 섭동에 의한 궤도요소(orbital elements)의 시간 변화율은 라그랑지 행성 방정식(Lagrange planetary equation)이나 가우스 행성 방정식(Gauss planetary equation)을 이용하여 계산할 수 있다. 여기서는 가우스 행성 방정식을 이용해서 계산해 보도록 하겠다.
게시글 (https://pasus.tistory.com/346)에 있는 가우스 행성 방정식은 다음과 같았다.
여기서
한편 게시글 (https://pasus.tistory.com/349)에 의하면 J2 섭동 가속도는 다음과 같이 ECI 죄표계
여기서
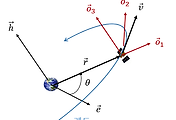
식 (1)과 (3)에 의하면 가우스 행성 방정식을 사용하려면 J2 섭동 가속도를 LVLH 좌표계로 변환해야 한다. ECI 좌표계
여기서

그러면 섭동 가속도는 다음과 같이 변환할 수 있다.
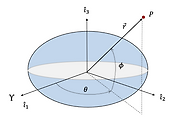
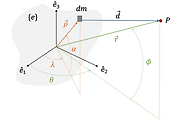
하지만 여기서 섭동 가속도를 좌표변환하기 전에 먼저 식 (3)의 섭동 가속도식에 있는 ECI 좌표계와 관련된 변수
그러면 ECI 좌표계에서 임시 좌표계로의 DCM
좌표변환을 이용하면 위치벡터
따라서 식 (4), (6), (7)을 이용하면 다음과 같은 관계식을 얻을 수 있다.
식 (8)을 식 (3)에 대입하면 J2 섭동 가속도는 다음과 같이 된다.
이제 식 (9)를 (5)에 대입하면 다음과 같이 LVLH 좌표계로 표현된 J2 섭동 가속도의 축 성분을 구할 수 있다.
여기서
촤종적으로 가우스 행성 방정식 (1)에 식 (11), (12), (13)을 대입하고 전개하면 J2 섭동에 의한 궤도요소의 시간 변화율은 다음과 같다.
'항공우주 > 우주역학' 카테고리의 다른 글
| 대기 항력에 의한 궤도요소의 시간 변화율 (0) | 2024.10.29 |
|---|---|
| J2 섭동에 의한 궤도요소의 시간 변화율 - 2 (0) | 2024.09.24 |
| J2 섭동 가속도 (J2 Perturbative Acceleration) (0) | 2024.09.14 |
| 중력 포텐셜 함수 (Gravity Potential Function) (0) | 2024.09.08 |
| 가우스 변분 방정식 (Gauss Variational Equation) (0) | 2024.09.01 |
댓글