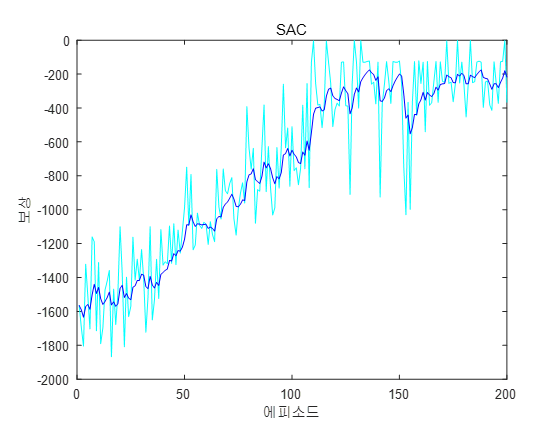
OpenAI Gym에서 제공하는 Pendulum-v0 환경을 대상으로 1개의 Q 신경망과 타깃 Q 신경망을 사용한 SAC 알고리즘을 Tensorflow2 코드로 구현하였다.
학습결과는 다음과 같다. 200회의 에피소드만에 학습이 완료됐다.
다음은 학습이 끝난 후 진자(pendulum)의 움직임이다.
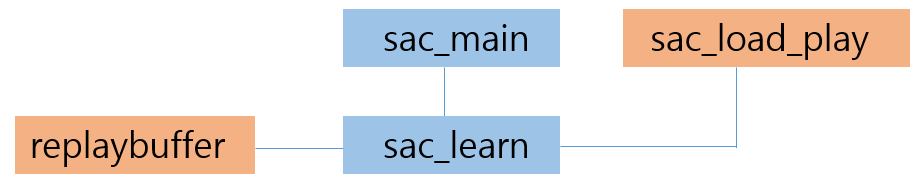
SAC 코드는 액터-크리틱 신경망을 구현하고 학습시키기 위한 sac_learn.py, 이를 실행시키기 위한 sac_main.py, 학습을 마친 신경망 파라미터를 읽어와 에이전트를 구동하기 위한 sac_load_play.py, 그리고 리플레이 버퍼를 구현한 replaybuffer.py로 구성되어 있다.
전체 코드 구조는 다음과 같다.
다음은 Tensorflow2 코드다.
sac_learn.py
# SAC learn (tf2 subclassing version)
# coded by St.Watermelon
import numpy as np
import matplotlib.pyplot as plt
from tensorflow.keras.models import Model
from tensorflow.keras.layers import Input, Dense, Lambda, concatenate
from tensorflow.keras.optimizers import Adam
import tensorflow as tf
import tensorflow_probability as tfp
from replaybuffer import ReplayBuffer
# actor network
class Actor(Model):
def __init__(self, action_dim, action_bound):
super(Actor, self).__init__()
self.action_dim = action_dim
self.action_bound = action_bound
self.std_bound = [1e-2, 1.0] # std bound
self.h1 = Dense(64, activation='relu')
self.h2 = Dense(32, activation='relu')
self.h3 = Dense(16, activation='relu')
self.mu = Dense(action_dim, activation='tanh')
self.std = Dense(action_dim, activation='softplus')
def call(self, state):
x = self.h1(state)
x = self.h2(x)
x = self.h3(x)
mu = self.mu(x)
std = self.std(x)
# Scale output to [-action_bound, action_bound]
mu = Lambda(lambda x: x*self.action_bound)(mu)
# clipping std
std = tf.clip_by_value(std, self.std_bound[0], self.std_bound[1])
return mu, std
def sample_normal(self, mu, std):
normal_prob = tfp.distributions.Normal(mu, std)
action = normal_prob.sample()
action = tf.clip_by_value(action, -self.action_bound, self.action_bound)
log_pdf = normal_prob.log_prob(action)
log_pdf = tf.reduce_sum(log_pdf, 1, keepdims=True)
return action, log_pdf
# critic network
class Critic(Model):
def __init__(self):
super(Critic, self).__init__()
self.x1 = Dense(32, activation='relu')
self.a1 = Dense(32, activation='relu')
self.h2 = Dense(32, activation='relu')
self.h3 = Dense(16, activation='relu')
self.q = Dense(1, activation='linear')
def call(self, state_action):
state = state_action[0]
action = state_action[1]
x = self.x1(state)
a = self.a1(action)
h = concatenate([x, a], axis=-1)
x = self.h2(h)
x = self.h3(x)
q = self.q(x)
return q
class SACagent(object):
def __init__(self, env):
## hyperparameters
self.GAMMA = 0.95
self.BATCH_SIZE = 32
self.BUFFER_SIZE = 20000
self.ACTOR_LEARNING_RATE = 0.0001
self.CRITIC_LEARNING_RATE = 0.001
self.TAU = 0.001
self.ALPHA = 0.5
self.env = env
# get state dimension
self.state_dim = env.observation_space.shape[0]
# get action dimension
self.action_dim = env.action_space.shape[0]
# get action bound
self.action_bound = env.action_space.high[0]
## create actor and critic networks
self.actor = Actor(self.action_dim, self.action_bound)
self.actor.build(input_shape=(None, self.state_dim))
self.critic = Critic()
self.target_critic = Critic()
state_in = Input((self.state_dim,))
action_in = Input((self.action_dim,))
self.critic([state_in, action_in])
self.target_critic([state_in, action_in])
self.actor.summary()
self.critic.summary()
# optimizer
self.actor_opt = Adam(self.ACTOR_LEARNING_RATE)
self.critic_opt = Adam(self.CRITIC_LEARNING_RATE)
## initialize replay buffer
self.buffer = ReplayBuffer(self.BUFFER_SIZE)
# save the results
self.save_epi_reward = []
## actor policy
def get_action(self, state):
mu, std = self.actor(state)
action, _ = self.actor.sample_normal(mu, std)
return action.numpy()[0]
## transfer actor weights to target actor with a tau
def update_target_network(self, TAU):
phi = self.critic.get_weights()
target_phi = self.target_critic.get_weights()
for i in range(len(phi)):
target_phi[i] = TAU * phi[i] + (1 - TAU) * target_phi[i]
self.target_critic.set_weights(target_phi)
## single gradient update on a single batch data
def critic_learn(self, states, actions, q_targets):
with tf.GradientTape() as tape:
q = self.critic([states, actions], training=True)
loss = tf.reduce_mean(tf.square(q-q_targets))
grads = tape.gradient(loss, self.critic.trainable_variables)
self.critic_opt.apply_gradients(zip(grads, self.critic.trainable_variables))
## train the actor network
def actor_learn(self, states):
with tf.GradientTape() as tape:
mu, std = self.actor(states, training=True)
actions, log_pdfs = self.actor.sample_normal(mu, std)
log_pdfs = tf.squeeze(log_pdfs, 1)
soft_q = self.critic([states, actions])
loss = tf.reduce_mean(self.ALPHA * log_pdfs - soft_q)
grads = tape.gradient(loss, self.actor.trainable_variables)
self.actor_opt.apply_gradients(zip(grads, self.actor.trainable_variables))
## computing soft Q target
def q_target(self, rewards, q_values, dones):
y_k = np.asarray(q_values)
for i in range(q_values.shape[0]): # number of batch
if dones[i]:
y_k[i] = rewards[i]
else:
y_k[i] = rewards[i] + self.GAMMA * q_values[i]
return y_k
## load actor weights
def load_weights(self, path):
self.actor.load_weights(path + 'pendulum_actor.h5')
self.critic.load_weights(path + 'pendulum_critic.h5')
## train the agent
def train(self, max_episode_num):
# initial transfer model weights to target model network
self.update_target_network(1.0)
for ep in range(int(max_episode_num)):
# reset episode
time, episode_reward, done = 0, 0, False
# reset the environment and observe the first state
state = self.env.reset()
while not done:
# visualize the environment
#self.env.render()
# pick an action: shape = (1,)
action = self.get_action(tf.convert_to_tensor([state], dtype=tf.float32))
# clip continuous action to be within action_bound
action = np.clip(action, -self.action_bound, self.action_bound)
# observe reward, new_state
next_state, reward, done, _ = self.env.step(action)
# add transition to replay buffer
train_reward = (reward + 8) / 8
self.buffer.add_buffer(state, action, train_reward, next_state, done)
if self.buffer.buffer_count() > 1000: # start train after buffer has some amounts
# sample transitions from replay buffer
states, actions, rewards, next_states, dones = self.buffer.sample_batch(self.BATCH_SIZE)
# predict target soft Q-values
next_mu, next_std = self.actor(tf.convert_to_tensor(next_states, dtype=tf.float32))
next_actions, next_log_pdf = self.actor.sample_normal(next_mu, next_std)
target_qs = self.target_critic([next_states, next_actions])
target_qi = target_qs - self.ALPHA * next_log_pdf
# compute TD targets
y_i = self.q_target(rewards, target_qi.numpy(), dones)
# train critic using sampled batch
self.critic_learn(tf.convert_to_tensor(states, dtype=tf.float32),
tf.convert_to_tensor(actions, dtype=tf.float32),
tf.convert_to_tensor(y_i, dtype=tf.float32))
# train actor
self.actor_learn(tf.convert_to_tensor(states, dtype=tf.float32))
# update both target network
self.update_target_network(self.TAU)
# update current state
state = next_state
episode_reward += reward
time += 1
## display rewards every episode
print('Episode: ', ep+1, 'Time: ', time, 'Reward: ', episode_reward)
self.save_epi_reward.append(episode_reward)
## save weights every episode
#print('Now save')
self.actor.save_weights("./save_weights/pendulum_actor.h5")
self.critic.save_weights("./save_weights/pendulum_critic.h5")
np.savetxt('./save_weights/pendulum_epi_reward.txt', self.save_epi_reward)
print(self.save_epi_reward)
## save them to file if done
def plot_result(self):
plt.plot(self.save_epi_reward)
plt.show()
sac_main.py
# SAC main (tf2 subclassing API version)
# coded by St.Watermelon
import gym
from sac_learn2 import SACagent
def main():
max_episode_num = 200
env = gym.make("Pendulum-v0")
agent = SACagent(env)
agent.train(max_episode_num)
agent.plot_result()
if __name__=="__main__":
main()
sac_load_play.py
# SAC load and play (tf2 subclassing API version)
# coded by St.Watermelon
import gym
from sac_learn2 import SACagent
import tensorflow as tf
def main():
env = gym.make("Pendulum-v0")
agent = SACagent(env)
agent.load_weights('./save_weights/')
time = 0
state = env.reset()
while True:
env.render()
action = agent.actor(tf.convert_to_tensor([state], dtype=tf.float32))[0][0]
state, reward, done, _ = env.step(action)
time += 1
print('Time: ', time, 'Reward: ', reward)
if done:
break
env.close()
if __name__=="__main__":
main()
'AI 딥러닝 > RL' 카테고리의 다른 글
| 가치 이터레이션 (Value Iteration)과 LQR (0) | 2021.06.23 |
|---|---|
| 정책 이터레이션 (Policy Iteration)과 LQR (0) | 2021.06.22 |
| Soft Actor Critic (SAC) 알고리즘 - 2 (0) | 2021.05.30 |
| Soft Actor Critic (SAC) 알고리즘 - 1 (0) | 2021.05.29 |
| 소프트 정책 이터레이션 (0) | 2021.05.28 |




댓글