우주공학의 미래라고 불리는 분산 우주시스템(distributed space system)은 단일 위성으로는 불가능한 임무를 수행하기 위해서 두 개 이상의 위성을 집단적으로 사용하는 시스템이다.
분산 우주시스템의 임무 개념의 예로서 궤도상(on-orbit) 서비스, 우주 상황 인식, 분산 군집(swarm) 기반 센싱, 위성 편대비행(formation flying), 랑데부 및 도킹 등을 들 수 있다.
분산 우주 시스템의 장점은 여러 위성 간의 상대 운동을 활용하는 데서 발생한다. 따라서 상대 운동을 표현하기 위한 좌표계와 기준 위성이 필요하다. 보통 분산 우주시스템의 임무가 지구를 중심으로 수행되므로 관성 좌표계로는 지구중심 관성좌표계(ECI, earth-centered inertial frame)를 사용한다 (https://pasus.tistory.com/184). 또한 기준 위성을 중심으로 하는 다른 위성의 상대 운동을 표현하기 위한 좌표계로서는 Hill 좌표계를 사용한다.
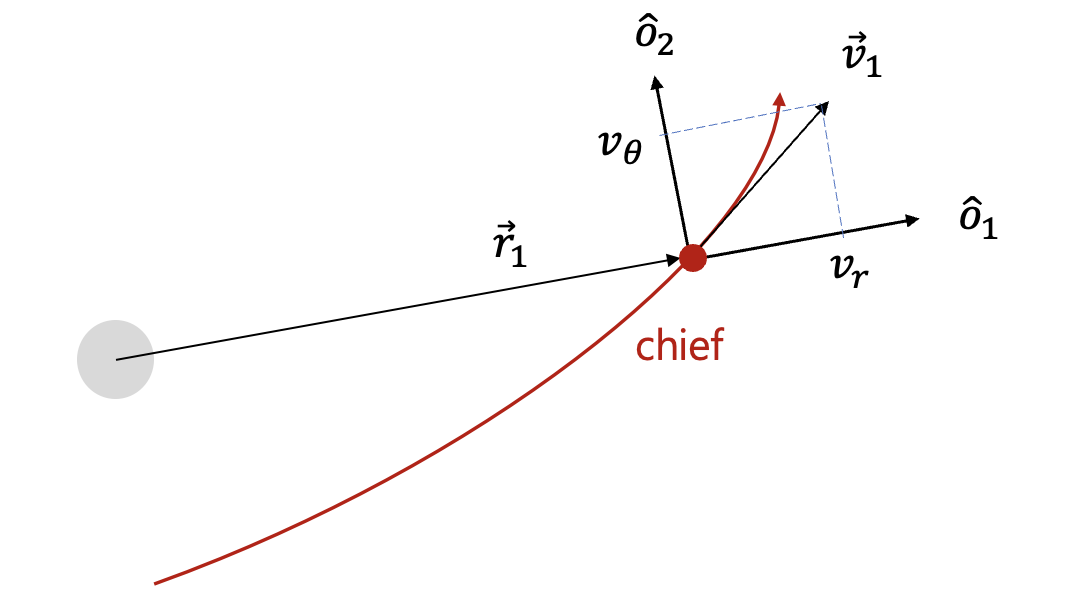
Hill 좌표계는 기준 위성의 중심에 원점이 있고
기준 위성은 일반적으로 수동적이고 기동성이 없는 실제 위성이나 또는 가상의 위성으로 정한다. 예를 들면 어떤 우주선이 국제우주정거장과 랑데부한다고 할 때, 국제우주정거장인 타깃을 따라가는 데 필요한 기동을 수행해야 하는 추격 위성(chaser) 보다는 타깃인 국제우주정거장을 기준 위성으로 삼는다. 기준 위성을 chief 위성, 기준 위성에 대해 상대 운동으로 표현되는 위성을 deputy 위성이라고 한다.
아래 그림에서

Hill 좌표계의 좌표축은 각각 다음과 같이 구할 수 있다.
여기서
Chief 위성과 deputy 위성은 각각 다음과 같이 이체문제의 기본 궤도 미분 방정식을 만족한다 (https://pasus.tistory.com/64).
여기서
또는
식 (5)로 주어지는 상대 운동 방정식은 두 위성의 거리의 크기에 제한이 없고 chief 위성의 궤도의 모양에 관계없이 유효하다.
이제 상대 위치벡터
이 가정은 랑데부 기동이나 근접 편대 비행의 경우와 같이 두 위성이 서로 근접해 있는 경우에 해당한다. 그러면 식 (5)에서
이다. 다음 관계식에서
식 (9)를 이용하면 식 (5)에서
이 되므로 식 (5)는 다음과 같이 된다.
식 (11)은 식 (5)의 선형화된 버전으로서 chief 위성에 대한 deputy 위성의 상대 운동을 나타내는 방정식이다. 식 (11)은 미지수
기본 운동학 방정식(BKE)에 의하면 식 (11)에 있는 관성 좌표계에서의 미분을 Hill 좌표계에서의 미분으로 변환시킬 수 있다 (https://pasus.tistory.com/121).
여기서
한편 chief 위성의 각운동량 벡터
각속도 벡터
여기서
이제 식 (13)을 Hill 좌표계의 각 축 성분으로 풀어 써보자. 먼저 chief 위성의 위치벡터
그러면 식 (15)를 이용하면 식 (12)에서 각 성분은 다음과 같이 표현할 수 있다.
식 (16)~(20)을 식 (13)에 대입하고 각 축 성분으로 나누어 쓰면 다음과 같다.
상대 위치 좌표
'항공우주 > 우주역학' 카테고리의 다른 글
| 상대 궤도요소 (Relative Orbital Elements) - 1 (0) | 2023.02.04 |
|---|---|
| CW 방정식 (Clohessy-Wiltshire Equations) (0) | 2023.01.27 |
| ECEF-LLH 좌표계 상호 변환 매트랩 코드 (0) | 2022.01.01 |
| ECEF 좌표계와 LLH 좌표계 (0) | 2021.12.30 |
| SCI 좌표계와 ECI 좌표계 (0) | 2021.12.30 |




댓글